Zu Beginn eines jeden EVC-Programms wird die EVC-Bibliothek eingebunden. Im Anschluss daran steht in der Hauptfunktion int main() der Programmcode.
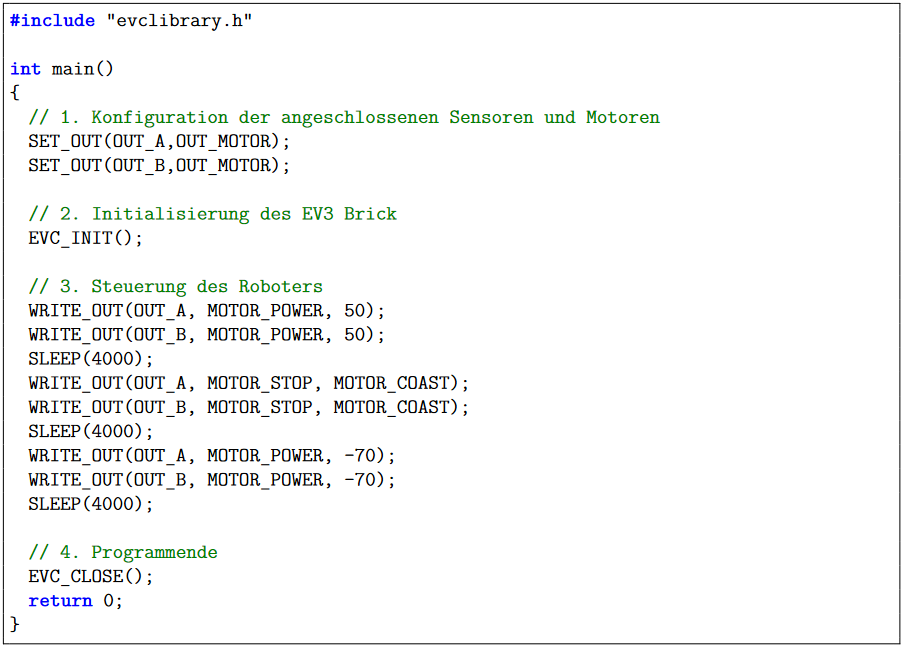
Basierend auf der EVC-Bibliothek müssen in der Hauptfunktion die folgenden vier Programmab schnitte enthalten sein:
1. Konfiguration der angeschlossenen Sensoren und Motoren
An dieser Stelle wird festgelegt, an welchen Eingängen Sensoren angeschlossen und an welchen Ausgängen Motoren angeschlossen sind.
2. Initialisierung
Ausgehend von den Anweisungen im Abschnitt 1 wird das Programm mit der Funktion EVC_INIT() so initialisiert, dass es auf die angeschlossenen Sensoren und Motoren zugreifen kann. Weiters werden
auch der Zugriff auf das Display, die LED und die Taster am Bedienpanel initialisiert.
3. Steuerung des Roboters
Hier steht nun der eigentliche Programmcode zur Steuerung des Roboters – es können Sensorwerte eingelesen werden und die Motoren angesteuert werden.
4. Programmende
Am Schluss des Programms muss der Zugriff auf die Hardware-Komponenten des EV3 Brick beendet werden. Dies geschieht durch den Aufruf der Funktion EVC_CLOSE().
Grundlegende Festlegungen in der Programmiersprache C
- Ein Programm in der Programmiersprache C besteht grundsätzlich aus der Funktion main(), die aufgerufen und ausgeführt wird, wenn das Programm gestartet wird.
- Jede Anweisung wird in der Programmiersprache C mit einem Strichpunkt beendet.
- Es ist üblich, Anweisungen, die mit geschwungenen Klammern { } zu Blöcken zusammengefasst werden, eingerückt zu schreiben.
- Ergänzende Informationen, die nicht zum Programmcode gehören, werden als Kommentare bezeichnet, hinter zweifachen // geschrieben und in der EVCdevelopIDE grün dargestellt.
- Bei Schlüsselwörtern handelt es sich um vordefinierte reservierte Bezeichner, die eine beson dere Bedeutung für den Compiler haben, wie z. B. include, int, if, while, break, return, ... Diese werden in der EVCdevelopIDE blau hervorgehoben.