Das KeplerOpenBOT Robotik-System basiert auf einem Arduino Nano Mikrocontoller Board. In Verbindung mit ergänzender Hardware (Sensoren und Aktoren) können einfache Steuer- und Regelaufgaben autonom ausgeführt werden können. Durch die vielfältigen Anschlussmöglichkeiten (8 I/O-Ports, 3 SPI Ports und 4 I2C Ports) ist es aber auch möglich damit einen Roboter zu entwickeln, der komplexe Aufgaben autonom bewältigen kann.
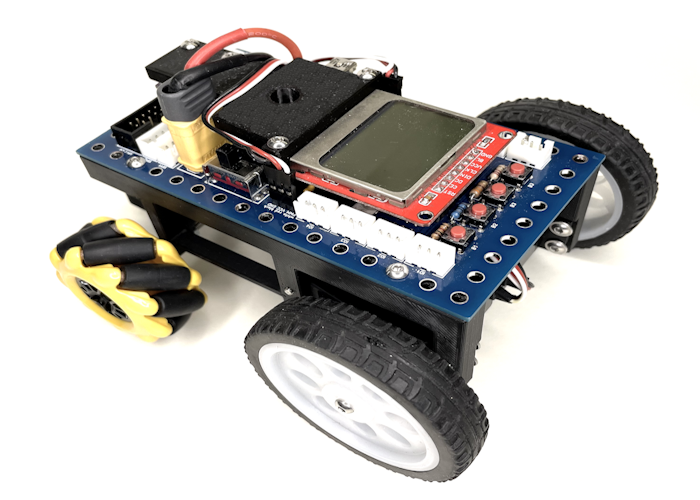
Die Software für den KeplerOpenBOT Controller wird mit der Arduino Programmierumgebung erstellt und dann auf den Controller übertragen, der diese in der Folge autonom ohne Verbindung mit einem PC ausführt. Die Übertragung eines Programms auf den KeplerOpenBOT Controller erfolgt über USB.