Ein Roboter erfüllt seine Aufgaben grundsätzlich durch das Erfassen seiner Umgebung mit Sensoren, der darauffolgenden Verarbeitung von Informationen und der meist der daraus resultierenden Bewegung von mechanischen Bauteilen, sogenannten Aktoren.
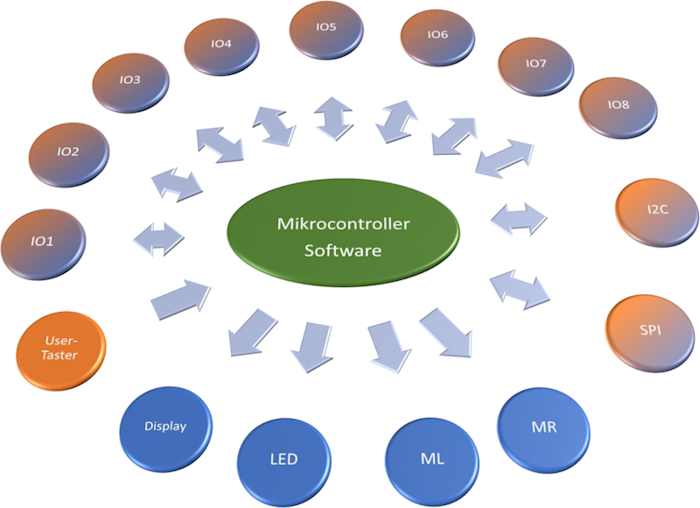
Bei einem KeplerOpenBOT Roboter können die Informationen von einer Vielzahl von Sensoren und den User-Buttons von dem Mikrocontroller auf dem Arduino Nano Board und der Software verarbeitet werden. Ausgehend von diesen Informationen und deren Verarbeitung von der Software können zwei Servo-Motoren angesteuert und auch optische Anzeigen am Display oder der LED generiert werden.
Autonome Roboter sollen dabei nicht nur vorgegebene Handlungsabläufe reproduzieren können, wie dies zum Beispiel Getränkeautomaten oder Industrieroboter in Produktionsprozessen tun, sondern aufgrund sich ändernder Umgebungsbedingungen mehr oder wenig selbstständig Entscheidungen über weitere Aktionen treffen.
Neben der Anforderung Sensoren zu finden oder zu entwickeln, welche die Umwelt eines Roboters bestmöglich erfassen können, liegt eine große Herausforderung vor allem auch darin die Informationen eines Sensors nicht nur so schnell wie möglich, sondern auch unter Einbeziehung aller anderen vorliegenden Informationen zu verarbeiten.
Daraus können sich auch bereits bei wenigen Sensoren sehr komplexe Aufgabenstellungen ergeben, die bei der Erstellung einer Software berücksichtigt werden müssen, damit der Roboter auf alle möglichen Situationen, die sich aus den Sensor-Informationen ergeben, richtig reagieren kann.
Der nächste Schritt bei der Informationsverarbeitung wäre dann hin zu selbstlernenden Systemen, die bei in der Zukunft liegenden Entscheidungsprozessen die Ergebnisse und Auswirkungen von früher getroffenen Entscheidungen mitberücksichtigen und sich somit im Laufe der Zeit immer mehr und mehr verbessern.