Bewegugsabläufe mit Counter
Aufgabe COUNTER1 - Quadrat
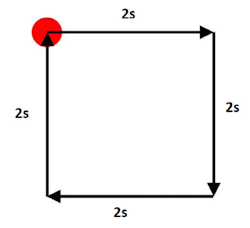
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) ein Quadrat fährt: 2 Sekunden geradeaus, um 90 Grad drehen, wieder 2 Sekunden geradeaus usw. bis er wieder an seinem Startpunkt ankommt und stehen bleibt.
Nachdem das Programm am Roboter gestartet wurde, soll die Fahrt des Roboters aber erst nach 3 Sekunden beginnen. Für die Zeitintervalle soll der Counter zum Einsatz kommen und der Roboter soll beim Erreichen seiner Startposition stehen bleiben.
Aufgabe COUNTER2 - Fahren von Wegstrecken
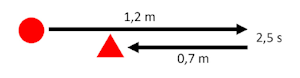
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) genau 1,2 Meter geradeaus fährt, 2,5 Sekunden stehen bleibt und dann 0,7 Meter rückwärts fährt.
Nachdem das Programm am Roboter gestartet wurde, soll der Roboter gleich losfahren. Die vorgegebenen Wegstrecken sollen unter Verwendung des Counters gefahren werden.
Der Roboter soll aber nicht stehen bleiben, wenn er an seinem Ausgangspunkt angekommen ist, sondern wieder von vorne beginnen die Strecken abzufahren.
Orientierungssensor
Aufgabe IMU1
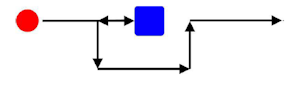
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem Tast- Sensor an der Vorderseite) gerade auf ein Hindernis zufährt und bei Berührung ein Ausweichmanöver startet. Das Hindernis soll dabei rechts oder links umfahren, aber nicht berührt werden. Der Roboter soll danach seinen Weg wie zuvor fortsetzen.
Für die Drehungen des Roboters soll der YAW-Wert des Orientierungssensors zum Einsatz kommen und dazu der aktuelle Wert des Sensors beim Berühren des Hindernisses als Ausgangswert dienen. Für die zu fahrenden Strecken beim Ausweichmanöver um das Hindernis soll der Counter verwendet werden.
Folgen einer Linie mit einem Sensor und einem Schwellenwert
Aufgabe S1Linie1
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen.
Die Linie soll grundsätzlich einen geraden Verlauf haben. Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Nun sollen für die herrschenden Lichtverhältnisse der passende Schwellenwert und die Werte für die Geschwindigkeiten so bestimmt werden, dass der Roboter der gesamten Linie bis zum Ende folgen kann, ohne diese zu verlassen.
![]()
Aufgabe S1Linie2
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen.
Die Linie soll grundsätzlich einen geraden Verlauf haben, aber Kurven unterschiedlicher Krümmung enthalten (siehe Grafik). Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Nun sollen für die herrschenden Lichtverhältnisse der passende Schwellenwert und die Werte für die Geschwindigkeiten so bestimmt werden, dass der Roboter dem gesamten Linienverlauf bis zum Ende folgen kann, ohne diesen zu verlassen.

Aufgabe S1Linie3
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen.
Die Linie soll einem Oval gleichen und die Kurven sollen annähernd die gleiche Krümmung aufweisen. Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Ziel ist es, optimale Werte für die Schwelle des Lichtwerts, wie auch für die Grundgeschwindigkeit und die Differenz zwischen beiden Geschwindigkeiten zu ermitteln, sodass der Roboter die vorgegebene Strecke so schnell wie möglich abfährt.
Begleitend dazu soll aber auch berücksichtigt werden, dass der Roboter mit diesen Werten dem Kurvenverlauf zehn Mal hintereinander verlässlich folgen kann, ohne dabei die Linie zu verlassen.
Aufgabe S1Linie4
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen.
Die Linie soll zwei rechte Winkel beinhalten (siehe Grafik). Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Für das Abbiegen bei rechten Winkeln sollen Werte für die Schwelle des Lichtwerts, wie auch für die Geschwindigkeiten ermittelt werden, damit der Roboter sicher und verlässlich die beiden rechten Winkel hintereinander passiert.
Die Aufgabe soll auf zwei Arten gelöst werden, sodass es eine Lösung für das Fahren auf der Innenseite und eine Lösung für das Fahren auf der Außenseite der Linie bzw. der Winkel gibt.

Folgen einer Linie mit einem Sensor und mehreren Wertebereichen
Aufgabe S1Linie5
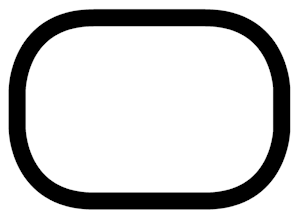
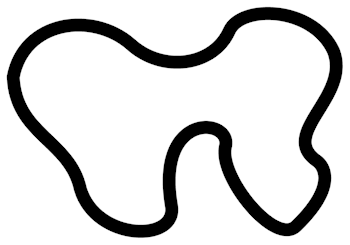
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen. Der Linienverlauf soll geschlossen sein und mehrere Kurven mit sehr unterschiedlichen Krümmungen beinhalten (siehe Grafik). Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Für den vorliegenden Kurvenverlauf sollen nun fünf Wertebereiche und dazu optimierte Geschwindigkeiten gefunden werden, damit der Roboter dem Linienverlauf sicher und verlässlich folgen kann.
Dabei soll auch berücksichtigt werden, dass es mit den ermittelten Werten möglich ist den Roboter mehrere Male hintereinander der Linie folgen zu lassen.
Dazu soll ein Programm für das Fahren auf der Innenseite und ein Programm für das Fahren auf der Außenseite erstellt werden.
Aufgabe S1Linie6
Ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) soll einem vorgegebenen Linienverlauf folgen.
Die Linie soll zwei rechte Winkel beinhalten (siehe Grafik). Diese Linie könnte z. B. mit einem schwarzen Klebeband (Isolierband) auf einem weißen Untergrund aufgeklebt werden.
Für das Abbiegen bei den rechten Winkeln sollen Werte für fünf Intervalle der Lichtwerte gefunden werden, damit der Roboter sicher und verlässlich bei beiden rechten Winkeln hintereinander abbiegt.
Die Aufgabe soll auf zwei Arten gelöst werden, sodass es eine Lösung für das Fahren auf der Innenseite und eine Lösung für das Fahren auf der Außenseite der Linie bzw. der Winkel gibt.
