1. Erzeugen eines neuen Programms
Nach dem Start der Arduino Entwicklungsumgebung wird meist das zuletzt bearbeitete Programm geöffnet. Beim Erstellen eines neuen Programms wird eine leere Vorlage mit den beiden Funktionen setup() und loop() erzeugt.
Klick auf File - New Sketch
2. Speichern des Progamms und Einbinden der KeplerOpenBOT Library
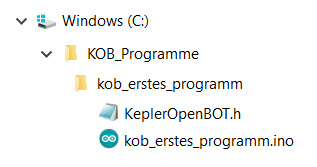
Es empfiehlt sich das Programm direkt nach dem Erstellen zu speichern und danach die KeplerOpenBOT Library in den Ordner der sketch-Datei zu kopieren. Im gewählten Ordner wird von der Arduino Entwicklungsumgebung automatisch ein neuer Ordner mit dem Namen des sketch angelegt und darin die sketch-Datei mit der Endung .ino gespeichert. In diesen Ordner muss auch die KeplerOpenBOT Library KeplerOpenBOT.h abgelegt werden, damit diese in das eigene Programm eingebunden werden kann.
Klick auf File - Save
Herunterladen der KeplerOpenBOT Library: Klick mit der rechten Maustaste auf den folgenden Link und "Ziel speichern unter ..." wählen
Die Ornder - und Dateistruktur nach dem Erstellen eines neuen Programms
3. Schreiben des Progammcodes
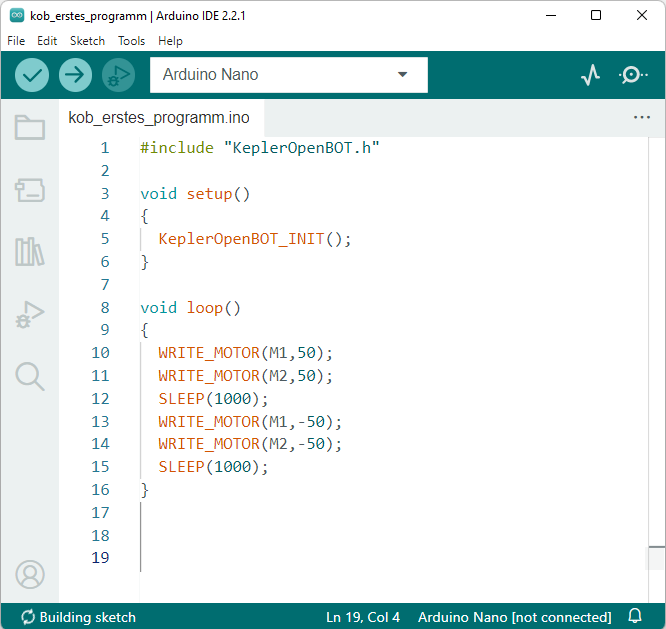
Bevor man mit dem Schreiben des eigenen Programmcodes beginnen kann, muss ganz zu Beginn die KeplerOpenBOT Library eingebunden werden und in der Funktion setup() die Funktion KeplerOpenBOT_INIT() aufgerufen werden um die Hardwarekomponenten auf dem KeplerOpenBOT Controller, wie auch den Zugriff darauf zu initialisieren.
Hier ein kurzes Programm, dass einen Roboter mit zwei Motoren jeweils für eine Sekunde vorwärts und rückwärts fahren lässt:
4. Verbinden des Roboters mit dem Computer und Auswahl des Arduino Nano Boards
Der Roboter wird eingeschaltet und das Arduino Nano Board wird mit einem USB Kabel mit dem Computer verbunden. Jetzt muss in der Arduino IDE das verbundene Board ausgewählt werden: Arduino Nano an der entsprechenden COM Schnittstelle, die automatisch erkannt wird. Ist das Ardunino Nano Board erfolgreich verbunden, so werden die Bezeichnung Arduino Nano fett und links daneben ein USB-Symbol angezeigt:
![]()
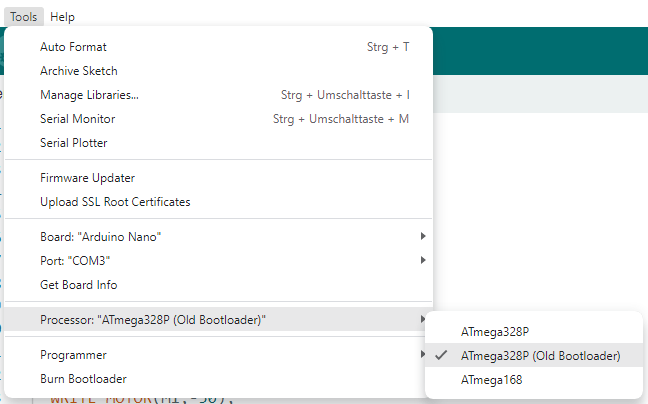
Je nachdem, welches Arduino Nano Board am Roboter verbaut ist, muss noch der richtige Prozessor-Typ ausgewählt werden. Dies erfolgt in der Arduino IDE durch:
Tools - Prozessor - ATmega328P (Old Bootloader)
5. Compilieren und Testen des Programmcodes
Bevor das Programm auf den KeplerOpenBOT Controller übertragen werden kann, muss dieses in eine für den Mikrocontroller am Arduino Nano Board verständliche Sprache übersetzt werden, damit das Programm auf diesem ausgeführt werden kann. Dieser Vorgang wird als compilieren und die dazu verwendete Software als Compiler bezeichnet. Dieser Compiler wird mit der Arduino Entwicklungsumgebung zur Verfügung gestellt.
Wurde der richtige Prozessortyp ausgewählt, für den man sein Programm geschrieben hat, so kann man den Code compilieren und diesen überprüfen lassen. Enthält der C-Code Fehler, so werden diese im Output-Bereich der Arduino IDE angezeigt.
Klick auf den Button Verify ![]()
6. Compilieren und Übertragen des Programms auf den Roboter
Verwendet man den Button Upload, wird der C-Code compiliert und danach erfolgt automatisch die Übertragung des Programms auf den KeplerOpenBOT Roboter, wozu das Arduino Nano Board über USB mit dem Computer verbunden sein muss.
Klick auf den Button Upload ![]()
7. Starten des Programms am Controller
Sobald das Programm auf den Controller übertragen ist, beginnt dieses automatisch zu laufen. Es wird also zunächst einmal der Code in der Funktion setup() und dann wiederholt der Code in der Funktion loop() ausgeführt.
Grundsätzlich wird das Ausführen des Programms mit dem Einschalten des Controllers gestartet und mit dem Ausschalten beendet.
In weiterer Folge könnte man z. B. einen der Taster am Controller dafür verwenden, um die Ausführung bestimmter Aktionen zu Starten, damit der Roboter nicht sofort zu fahren beginnt, wenn dieser eingeschaltet wird.