Ansteuern von Motoren
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Ansteuern von Motoren
Aufgabe M1
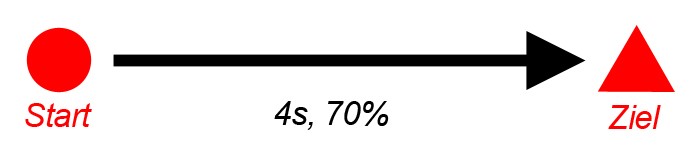
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) 4 Sekunden mit 70% Motorleistung vorwärts fährt und danach stoppt.
Aufgabe M2
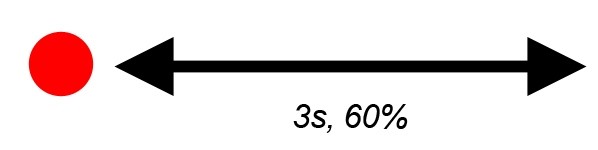
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) 3 Sekunden mit 60% Motorleistung vorwärts fährt, wieder die gleiche Strecke rückwärts fährt und danach stoppt.
Aufgabe M3
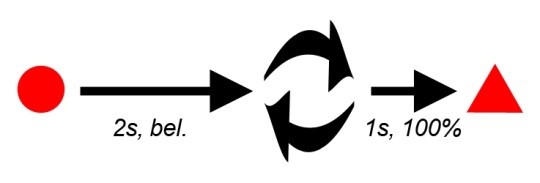
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) 2 Sekunden mit beliebiger Motorleistung vorwärts fährt, sich auf der Stelle einmal um seine eigene Achse dreht, dann nochmals eine Sekunde mit maximaler Leistung in der ursprünglichen Richtung vorwärts fährt und danach stoppt.
Aufgabe M4
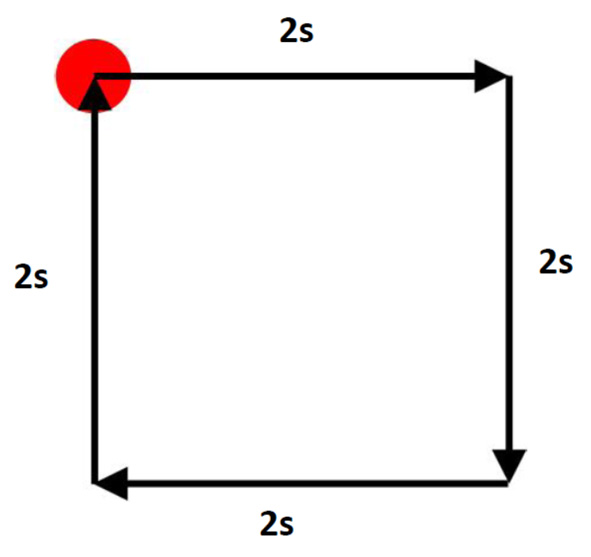
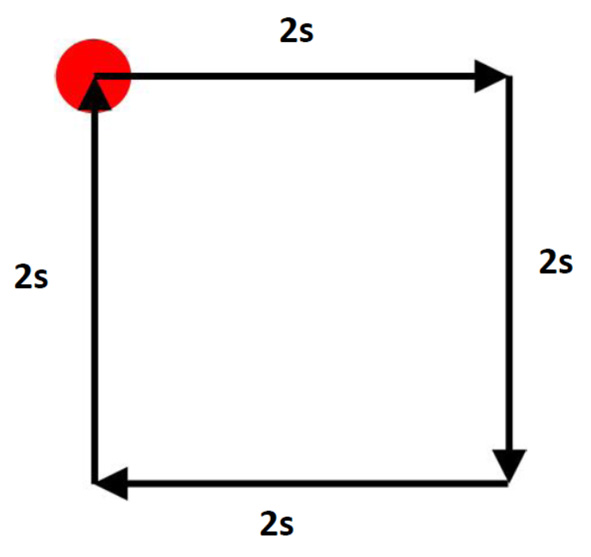
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) ein Quadrat fährt: 2 Sekunden geradeaus, um 90 Grad drehen, wieder 2 Sekunden geradeaus usw. bis er wieder an seinem Startpunkt ankommt und stehen bleibt.
Aufgabe M5
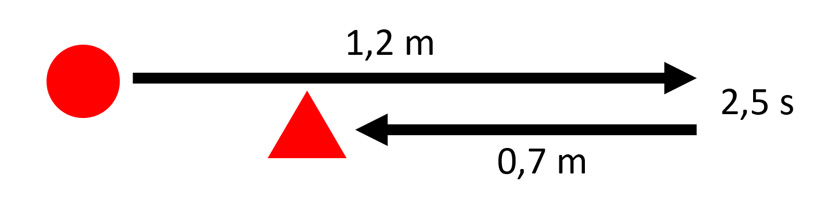
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) genau 1,2 Meter geradeaus fährt, 2,5 Sekunden stehen bleibt und dann 0,7 Meter rückwärts fährt.
Aufgabe M6
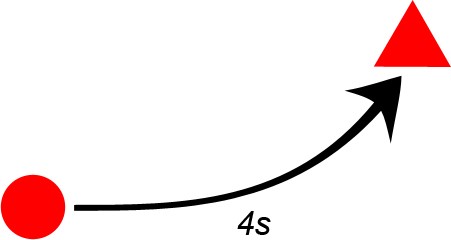
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) für 4 Sekunden eine leichte Kurve nach links fährt und danach stoppt.
Aufgabe M7
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) für 5,5 Sekunden eine starke Kurve nach rechts fährt und danach stoppt.

Aufgabe M8
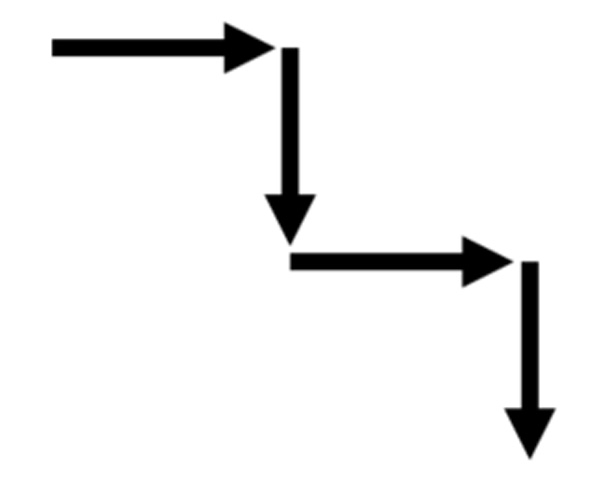
Erstelle ein Programm, mit dem der Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) ein Treppenmuster fährt. Bei den Richtungsänderungen soll er sich immer am Stand drehen.
Aufgabe M9
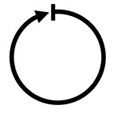
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) einen Kreis fährt und genau an der Ausgangsposition stoppt. Die Motorleistung kann dabei beliebig gewählt werden.
Aufgabe M10
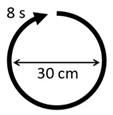
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) einen Kreis mit einem Durchmesser von ca. 30 cm fährt. Dafür soll der Roboter genau 8 Sekunden brauchen.
Aufgabe M11
Erstelle ein Programm mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) den folgenden Bewegungsablauf mit unterschiedlichen Geschwindigkeiten nachfährt. Die Geschwindigkeiten können dabei beliebig gewählt werden:
- beide Motoren für 4 Sekunden vorwärts
- Roboter hält für 2 Sekunden an
- Drehung am Stand für 3 Sekunden
- Roboter fährt für 3 Sekunden rückwärts
- Drehung nur mit einem Rad für 5 Sekunden
- Roboter hält für 4 Sekunden an
- Roboter fährt 2 Sekunden lang rückwärts
- Roboter stoppt
LED am EV3 Brick
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt LED am EV3 Brick
Aufgabe LED1
Erstelle ein Programm das mit der eingebauten LED im Bedienfeld des EV3 Roboters alle möglichen Farben und Anzeigemodi nacheinander jeweils für eine Dauer von 2 Sekunden zeigt. Danach soll das Programm automatisch enden.
Text am Display
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Ausgeben von Text am Display
Aufgabe D1
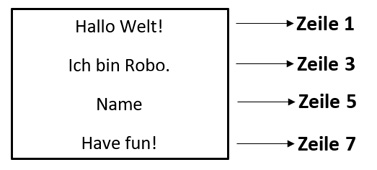
Erstelle ein Programm, bei dem zentriert in der Mitte des Displays folgender Text ausgegeben wird (setze in der Zeile 5 deinen Namen ein).
Aufgabe D2
Ergänze das Programm von Aufgabe D1 so, dass eine Zeile nach der anderen in einem zeitlichen Abstand von drei Sekunden erscheint.
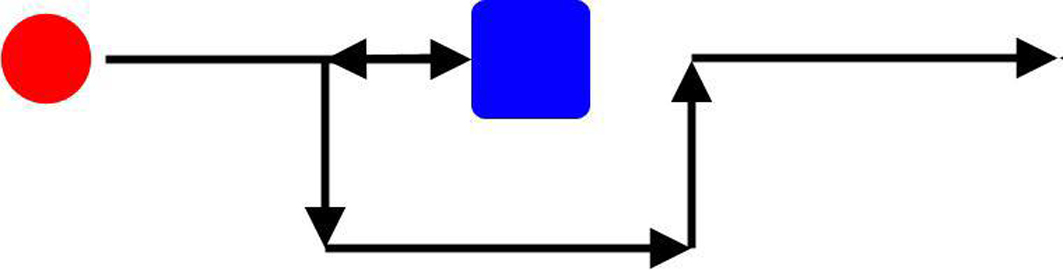
Aufgabe D3
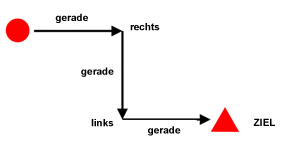
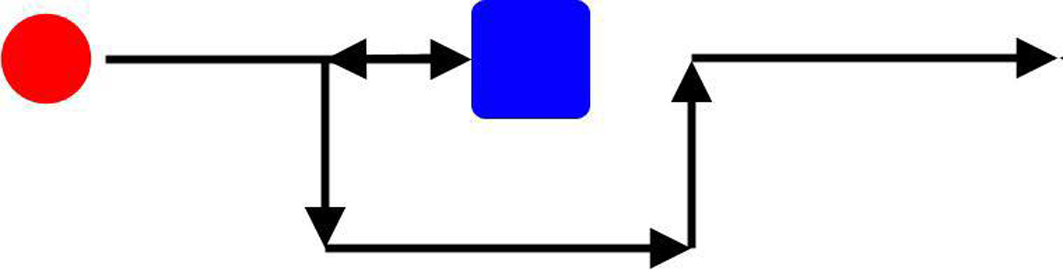
Erstelle ein Programm, bei dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) die vorgegebene Figur nachfährt. Dabei soll der aktuelle Bewegungsablauf mit den in der Grafik angegebenen Bezeichnungen am Display angezeigt werden.
Zeichnen am Display
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Zeichnen am Display
Aufgabe Z1
Erstelle ein Programm, das vier ausgefüllte und vier nicht ausgefüllte Rechtecke am Display anzeigt, die sich nicht überschneiden, aber über den gesamten Bildschirmbereich verteilt sein sollen.
Aufgabe Z2
Erstelle ein Programm mit dem das in der Abbildung dargestellte Gesicht am Display gezeichnet wird.
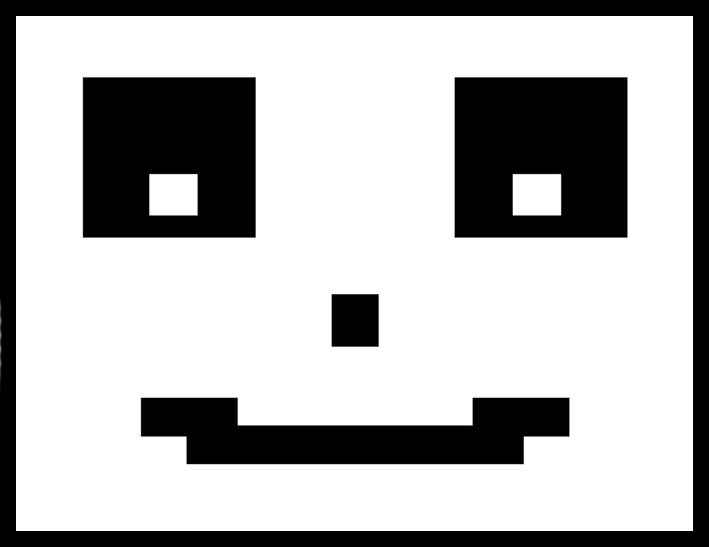
Aufgabe Z3
Erweitere das Gesicht aus Aufgabe Z2 dahingehend, dass sich die Pupillen in den Augen ein paar Mal hin- und herbewegen.
Variablen und Schleifen
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Variablen und wiederholtes Ausführen von Anweisungen
Aufgabe S1
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) 3 Mal 2 Sekunden mit 85% Motorleistung vorwärts fährt, wieder die gleiche Strecke rückwärts fährt und danach stoppt. Verwende für die mehrfache Ausführung dieses Bewegungsvorgangs eine while-Schleife.
![]()
Aufgabe S2
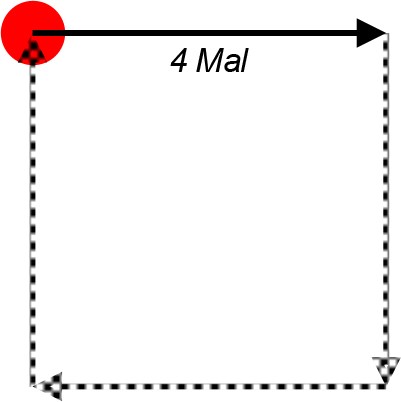
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) 4 Mal 2 Sekunden geradeaus fährt, sich um 90 Grad nach rechts dreht und somit seine Bahn ein Quadrat beschreibt. Verwende für die vierfache Ausführung des Bewegungsvorgangs geradeaus - drehen eine while-Schleife.
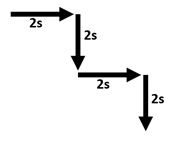
Aufgabe S3
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) ein Treppenmuster fährt. Bei den Richtungsänderungen soll er sich immer am Stand drehen. Verwende für sich wiederholende Bewegungsabläufe eine while-Schleife.
Aufgabe S4
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) dreimal einen liegenden Achter fährt. Der eine Kreis des Achters soll dabei deutlich größer als der andere Kreis sein. Der Roboter soll dafür zwischen 20 und 25 Sekunden brauchen. Verwende für sich wiederholende Bewegungsabläufe eine while-Schleife.
Aufgabe S5
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) für 10 Sekunden eine Schlangenlinie fährt und danach stoppt. Sich wiederholende Bewegungsabläufe sollen mit einer while-Schleife realisiert werden.
if-Abfrage und Taster
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Entscheidungsabfrage und Reaktion auf Taster
Aufgabe B1
Erstelle ein Programm, das durch Abfrage der Taster die LED am Display steuert. Wird der linke Taster gedrückt, soll die LED-Anzeige rot leuchten, wird der rechte Taster gedrückt, soll die LEDAnzeige grün leuchten. Wird der mittlere Taster gedrückt, dann soll das Programm beendet werden.
Touch-Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Der Touch-Sensor
Aufgabe T1
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem Touch- Sensor an der Vorderseite) so lange geradeaus fährt, bis er auf ein Hindernis trifft. Dann soll er 1,5 Sekunden gerade zurück fahren und stehen bleiben.

Aufgabe T2
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem Touch- Sensor an der Vorderseite) in einer Endlosschleife immer wieder so lange geradeaus fährt, bis er auf ein Hindernis trifft. Dann soll er 1,5 Sekunden gerade zurück fahren, kurz stehen bleiben und wieder geradeaus fahren, bis er wieder auf das Hindernis trifft. Das Programm soll durch einen Druck auf den Exit-Button beendet werden können.

Aufgabe T3
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem Touch- Sensor an der Vorderseite) gerade auf ein Hindernis zufährt und bei Berührung ein Ausweichmanöver startet. Das Hindernis soll dabei rechts oder links umfahren, aber nicht berührt werden. Der Roboter soll danach seinen Weg wie zuvor fortsetzen.
Aufgabe T4
Ein Roboter (Standardroboter mit zwei Motoren und einem Touch-Sensor an der Vorderseite) soll in einem durch Wände abgeschlossenen Bereich nach einer bestimmten Zeit die gesamte Fläche abfahren (Rasenmäherroboter). Dazu soll der Roboter beim Berühren einer Wand mit dem Tast- Sensor umdrehen und in die entgegengesetzte Richtung fahren. Dabei soll sich der Roboter nicht genau um 180 Grad drehen. Zusätzlich soll es möglich sein, den Roboter durch einen Druck auf den Exit-Button abzustoppen.
Licht-Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Ausgabe von Zahlen und der Licht-Sensor
Aufgabe L1
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) so lange geradeaus fährt, bis der Lichtsensor auf eine schwarze Linie am Boden trifft. Dort soll der Roboter stehen bleiben.
Aufgabe L2
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor an der Vorderseite) so lange geradeaus fährt, bis er auf eine schwarze Linie am Boden trifft. Erst wenn der Lichtsensor die Linie überfahren hat und wieder den weißen Untergrund erreicht hat, soll der Roboter stehen bleiben.
Aufgabe L3
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren, einem nach unten gerichteten Licht-Sensor und einem an einer beliebigen Stelle montierten Touch-Sensor), der auf einer strukturierten Oberfläche (z. B. aufgeklebte schwarze Linien auf einer weißen Oberfläche) in Kreisbahnen fährt und der aktuelle Wert des Lichtsensors am Display anzeigt wird. Wird der Touch-Sensor gedrückt, soll der Roboter stehen bleiben.
Aufgabe L4
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Licht-Sensor) auf einer weißen Oberfläche in Richtung von drei parallelen schwarzen Linien fährt. Der Roboter soll beim Überfahren die Linien mitzählen und die Anzahl am Display anzeigen.
Farb-Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Ausgabe von Zahlen und der Farb-Sensor
Aufgabe F1
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Farb/Licht-Sensor) zwischen einer grünen und roten Linie hin- und herfährt. Das Erkennen der jeweiligen Farbe soll dazu führen, dass der Roboter umdreht und in die entgegengesetzte Richtung fährt. Dabei soll der Roboter bei der grünen Linie eine Drehung nach rechts und bei der roten Linie eine Drehung nach links machen.
Ultraschall-Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Der Ultraschall-Sensor
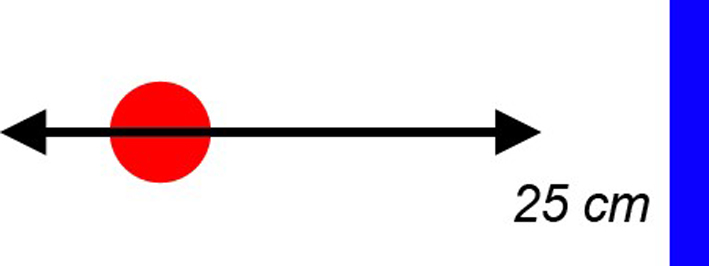
Aufgabe U1
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach vorne gerichteten Ultraschall-Sensor an der Vorderseite) so lange geradeaus fährt, bis er sich 25 cm vor einem Objekt entfernt befindet. Dort soll der Roboter für 2 Sekunden stehenbleiben und dann 1 Sekunde zurück fahren.
Aufgabe U2
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach vorne gerichteten Ultraschall-Sensor an der Vorderseite) gerade auf ein Hindernis zufährt und 10 cm vor Berührung ein Ausweichmanöver startet. Das Hindernis soll dabei rechts oder links umfahren, aber nicht berührt werden. Der Roboter soll nach dem Hindernis seinen Weg wie zuvor fortsetzen.
Aufgabe U3
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem rechtwinkelig zur Seite gerichteten Ultraschall-Sensor) in einem gleichbleibenden Abstand einer Wand entlang fährt. Dazu soll der Abstand mit dem Ultraschallsensor zur Seite gemessen werden. Grundsätzlich startet der Roboter mit einer konstanten Vorwärtsbewegung. Wird der Abstand zur Wand größer als ein vorgegebener Wert, dann soll der Roboter mit einer leichten Korrektur in Richtung Wand reagieren. Wird der Abstand zu Wand kleiner als ein vorgegebener Wert, dann soll der Roboter sich mit einer leichten Gegenbewegung von der Wand wegbewegen.
Gyro-Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Der Gyro-Sensor
Aufgabe G1
Ein Roboter (Standardroboter mit zwei Motoren und einem Gyro-Sensor) soll zunächst für 2 Sekunden geradeaus fahren. Nach dieser Zeit soll er sich beginnen (langsam!) am Stand zu drehen. Unter Verwendung des Werts des Gyro-Sensors soll sich der Roboter genau 90 Grad drehen, fährt dann wieder für 2 Sekunden geradeaus und bleibt stehen. Zeige dazu als Hilfe den aktuellen Wert des Gyro-Sensors auf dem Display an!
Aufgabe G2
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad und einem Gyro-Sensor) ein Quadrat fährt: 2 Sekunden geradeaus, um 90 Grad drehen, wieder 2 Sekunden geradeaus usw. bis er wieder an seinem Startpunkt ankommt und stehen bleibt. Die sich dabei wiederholenden Bewegungsabläufe sollen mit einer while-Schleife umgesetzt werden und für die exakten Drehungen soll der Gyro-Sensor zum Einsatz kommen.