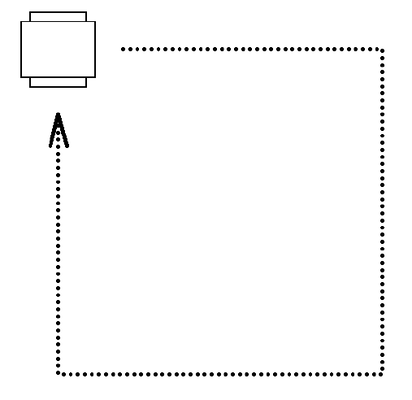
Abfahren eines Quadrats
Die Motoren des Roboters sollen so angesteuert werden, dass der Roboter wiederholt ein Quadrat mit der Seitenlänge von ca. einem Meter abfährt.
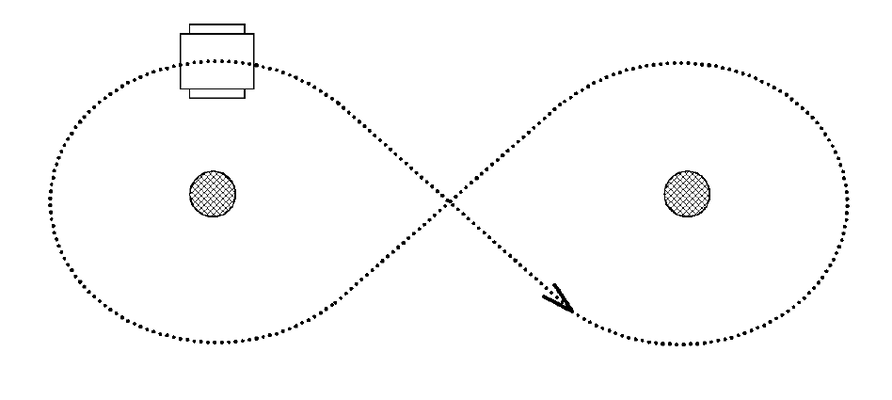
Fahren entlang eines Achters
Der Roboter soll zwischen zwei markierten Punkten eine Acht fahren.
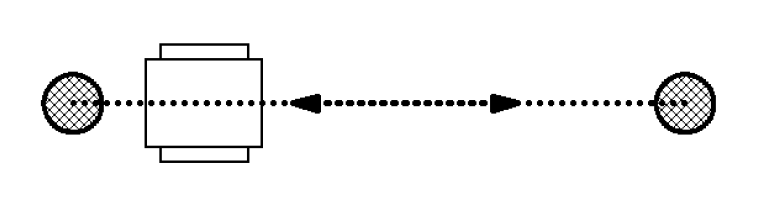
Hin- und Herfahren entlang einer Linie
Der Roboter soll auf einer gedachten Linie mehrmals zwischen zwei markierten Punkten hin- und herfahren und möglichst genau direkt auf den Punkten um 180° wenden.
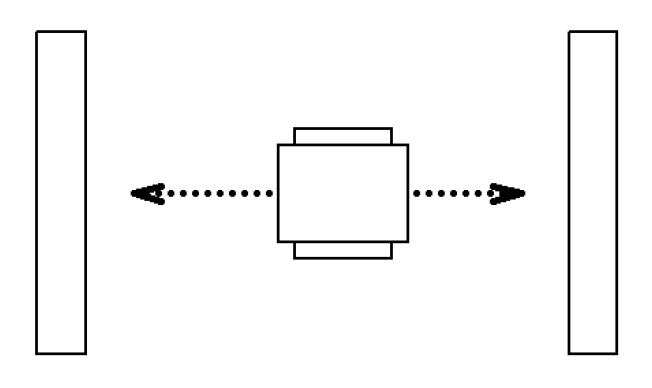
Hin- und herfahren zwischen zwei Wänden
Der Roboter soll mehrmals zwischen zwei Wänden, die in etwa einen Meter voneinander entfernt sind, hin- und herfahren. Dazu soll der Berührungssensor zum Einsatz kommen, der anzeigt, wann der Roboter sich drehen muss um in Richtung der anderen Wand zu fahren.
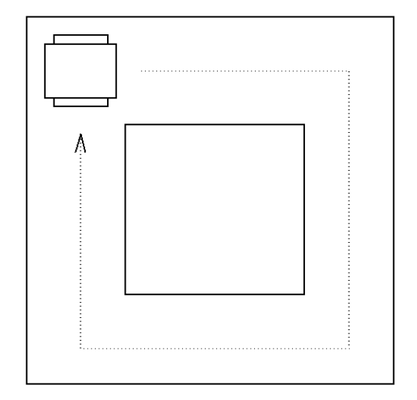
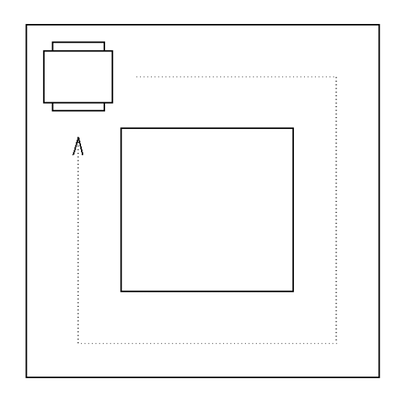
Fahren entlang eines rechtwinkeligen Kanals
Mit Wänden ist ein Kanal aufgebaut, der der Form eines Quadrats entspricht. Der Roboter soll innerhalb dieses Kanals mehrere Runden fahren und dabei die Wände so selten wie möglich zu berühren. Trifft der Berührungssensor auf eine Wand, so soll der Roboter eine entsprechende Drehung ausführen und bis zur nächsten Abzweigung fahren.
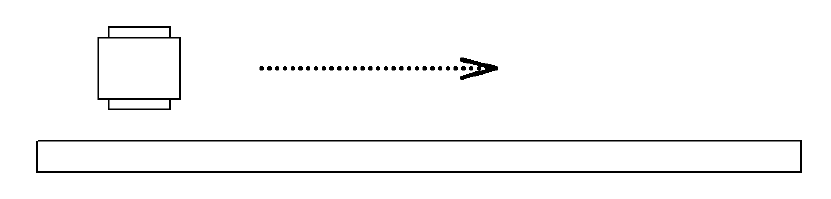
Fahren entlang einer Wand
Der Abstandssensor wird auf der Seite des Roboters montiert. Nun soll der Roboter eine längere Strecke - immer im gleichen Abstand! – der Wand entlang fahren.
Fahren entlang eines rechtwinkeligen Kanals
Der Abstandssensor ist an der Vorderseite des Roboters montiert. Mit Wänden ist ein Kanal aufgebaut, der der Form eines Quadrats entspricht. Der Roboter soll innerhalb dieses Kanals mehrere Runden fahren und dabei die Wände nicht berühren. Der Abstandssensor soll dazu verwendet werden, dass der Roboter seine Drehung um 90° bereits beginnt, bevor er noch die vor ihm liegende Wand berührt.