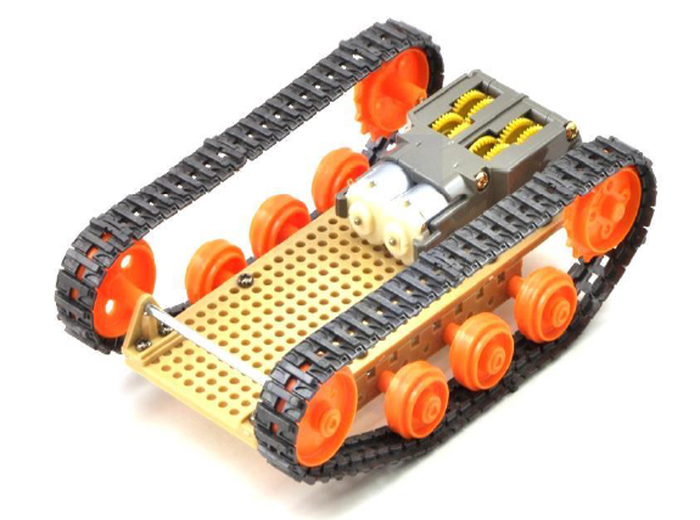
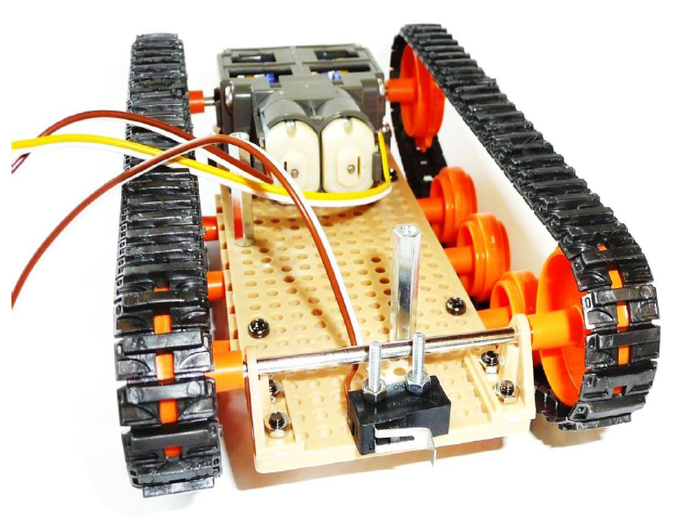
Die Plattform
Anschluss der Motorkabel
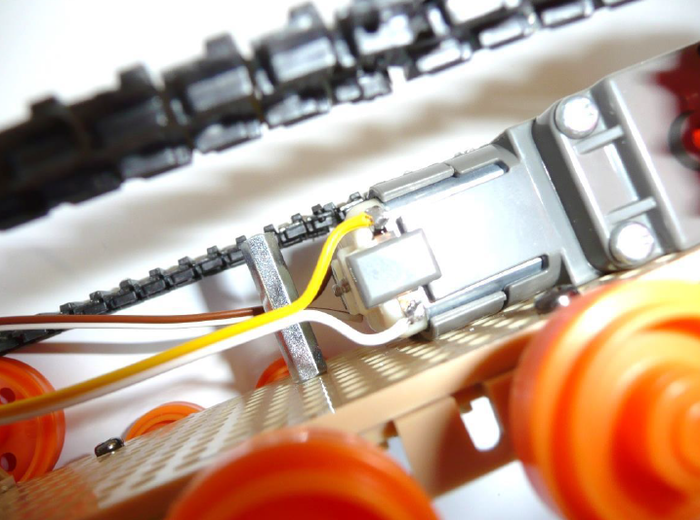
Die Plattform mit den Anschlusskabeln für die Motoren und dem Taster mit Anschlusskabel
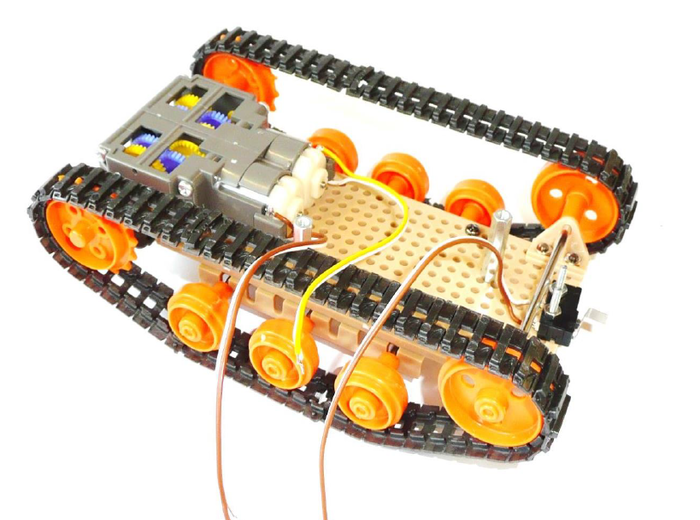
Die Plattform mit den Anschlusskabeln für die Motoren und dem Taster mit Anschlusskabel
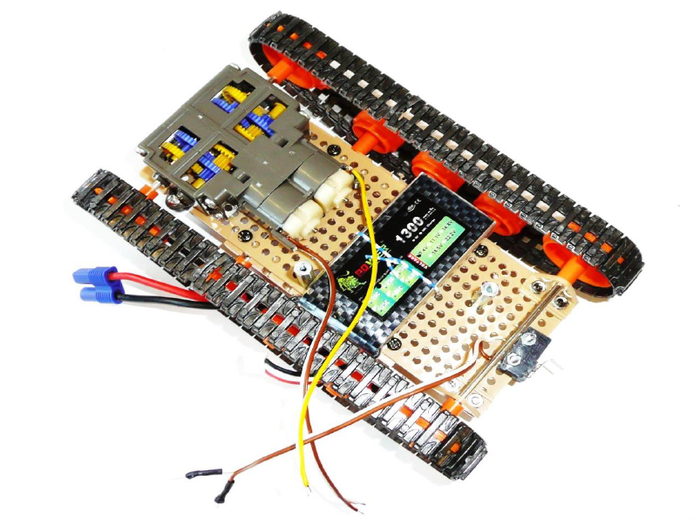
Der LiPo Akku wird auf der Grundplatte befestigt
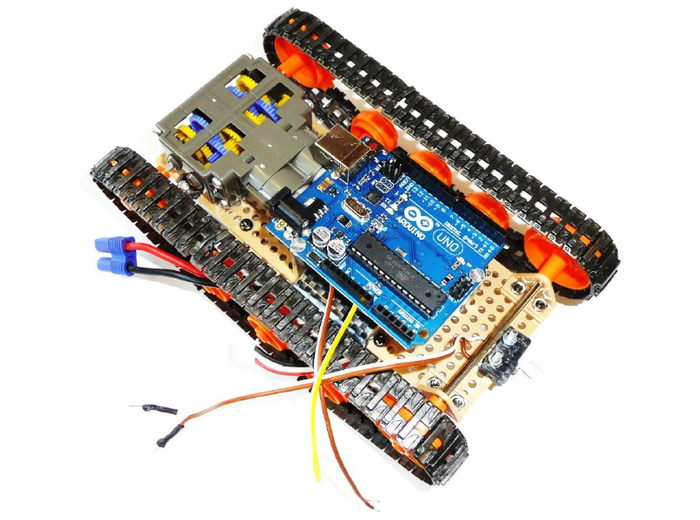
Das Arduino Board wird an den beiden Distanzbolzen angeschraubt
Das Motor Shield wid auf das Arduino Board gesteckt
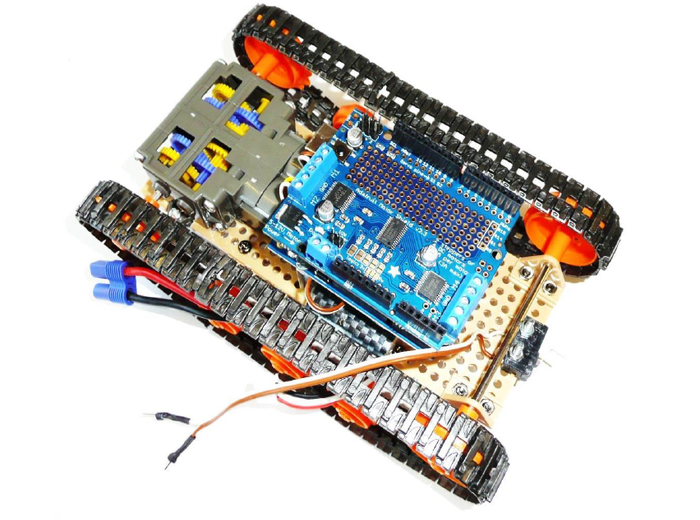
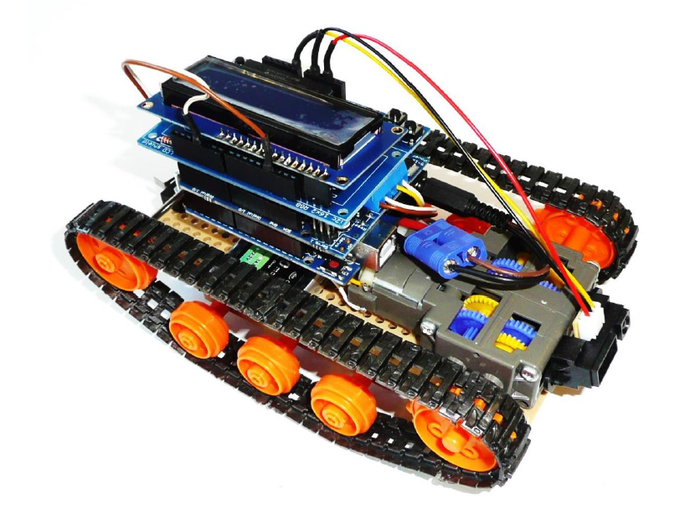
Das Display Shield wird auf das Motor Shield gesteckt und die beiden Sensoren angeschlossen
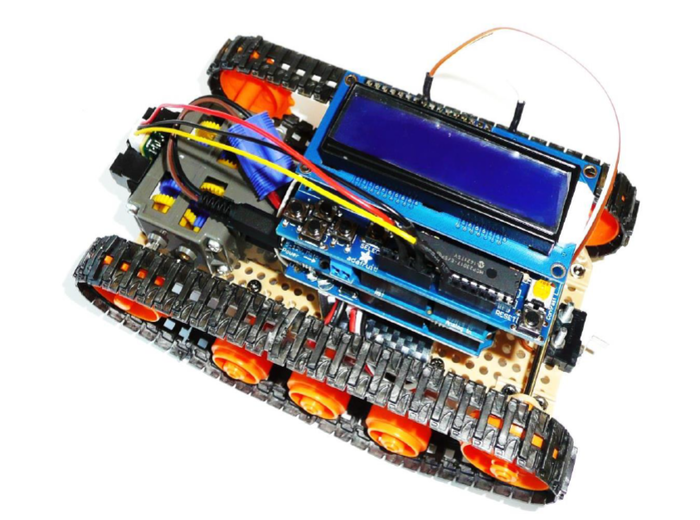
Der fertig zusammengebaute Arduino TrackBot