Bei der Zusammenstellung der Komponenten dieses Roboters wurden zwei Sensoren ausgewählt, die ohne zusätzliche Elektronik direkt an das Arduino UNO Board angeschlossen werden können.
Mikroschalter als Berührungssensor
Der einfachste Sensor der bei Robotern zum Einsatz kommt, lässt sich mit einem Taster realisieren. Dieser kann zum Beispiel dazu dienen, um auf das Berühren eines Hindernisses zu reagieren.
Die Auswertung dieses Sensors liefert zwei Werte: Taster offen oder Taster geschlossen
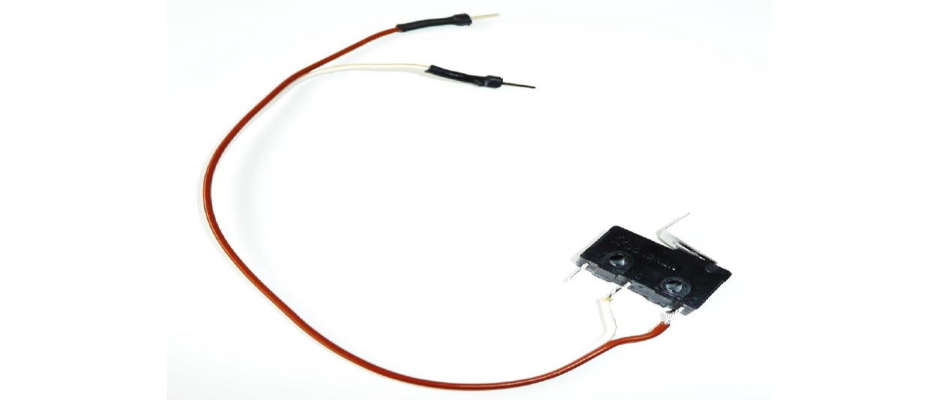
Sehr gut eignen sich für solche Sensoren Mikroschalter, da diese meist über einen Metallbügel zum Auslösen des Schaltkontaktes verfügen und einen genau definierten Druckpunkt haben, bei dem der Schaltkontakt geschlossen wird.
Infrarot-Abstandssensor
Zum Messen von Entfernungen können bei Robotern Infrarot-Abstandssensoren zum Einsatz kommen. Die Firma Sharp hat sehr kompakte Sensoren entwickelt, die sehr einfach ohne zusätzliche Elektronik direkt an einen analogen Eingang eines Mikrokontrollers angeschlossen werden kann.
Die Bestimmung der Entfernung basiert auf dem Reflexionswinkel zwischen ausgesandtem und reflektiertem infraroten Licht. Diese Information wird am Ausgang des Sensors durch Spannungen zwischen 0V und 5V bereitgestellt.
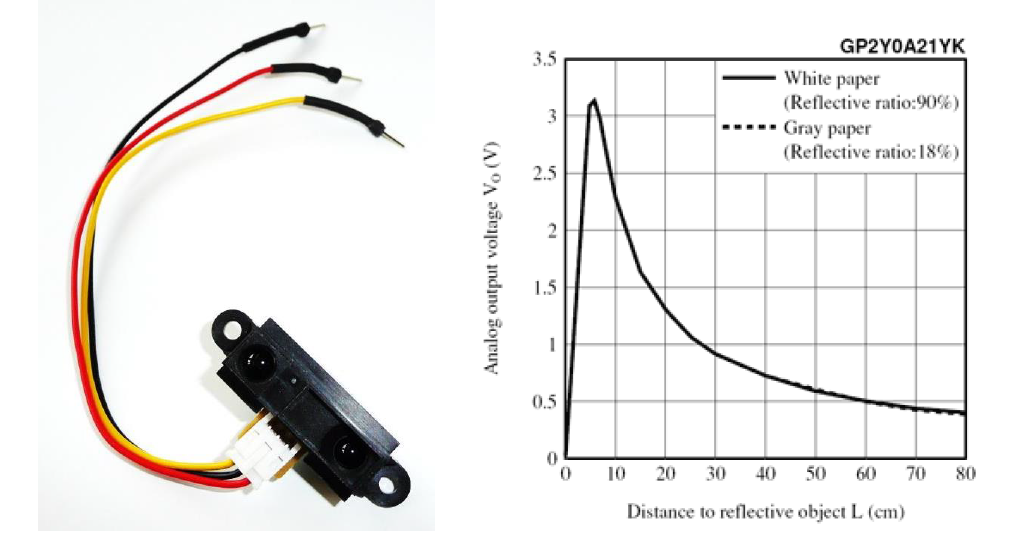
Der Zusammenhang zwischen Entfernung und Spannung hängt vom jeweiligen Sensor ab und ist dem Datenblatt des jeweiligen Sensors zu entnehmen.
Reflexionssensor
Für die sonsorische Abtastung des Bodens auf dem sich ein Roboter bewegt um auf etwaige Markierungen zu reagieren oder einer schwarzen Linie zu folgen, werden Reflexionssensoren benötigt. Solche kann man auch selbst auf sehr einfache Weise bauen. Der hier vorgestellte Sensor wurde im Rahmen des Projekts kepler robotik entwickelt. Dieser Sensor war über 10 Jahre bei unzähligen Robotern bei nationalen und internationalen Wettbewerben sehr erfolgreich im Einsatz, wo es darum ging, Linien unterschiedlicher Farben auf unterschiedlichen Untergründen zu dedektieren.
Kommerziellen Bodensensoren, die vielfach mit rotem oder infrarotem Licht arbeiten, war dieser einfache DIY Sensor bei den verschiedensten Bedingungen meist überlegen, nicht zuletzt dadurch, dass sich die Empfindlichkeit und somit eine schnelle Anpassung an die aktuell herschenden Lichtverhältnisse schnell und einfach mit einem Potentiometer vor Ort einstellen lässt.
Angeschlossen wird dieser Sensor an einen analogen Eingang des Arduino-Boards. Die dort gemessenen Spannungswerte können für die Interpretation unterschiedlicher starker Reflexionsintensitäten des Lichts der weißen LED vom Untergrund herangezogen werden.
Material
- 1 Drehwiderstand 47 kOhm
- 1 Widerstand 100 Ohm
- 1 superhelle weiße LED
- 1 Fototransistor L-93DP3C
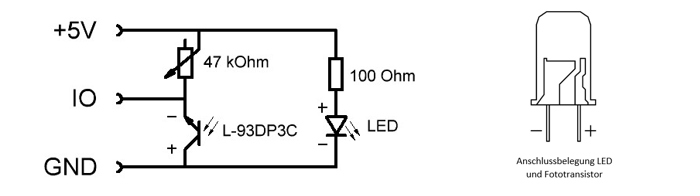
Schaltplan und Anschlussbelegung der LED und des Fototransistors
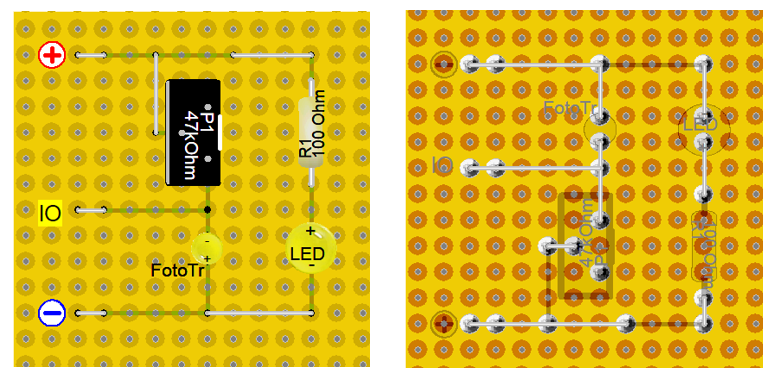
Bauplan für den Aufbau auf einer Lochrasterplatine - Vorderseite und Rückseite