Fahrfunktionen
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Motorsteuerung
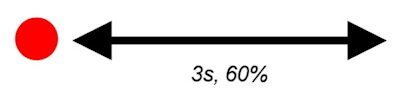
Aufgabe MOTOR1 - Vorwärts- und Rückwärtsfahren
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) 3 Sekunden mit 60% Motorleistung vorwärts fährt, wieder die gleiche Strecke rückwärts fährt und danach stoppt.
Aufgabe MOTOR2 - Rotation um die eigene Achse
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) 2 Sekunden mit beliebiger Motorleistung vorwärts fährt, sich auf der Stelle einmal um seine eigene Achse dreht, dann nochmals eine Sekunde mit maximaler Leistung in der ursprünglichen Richtung vorwärts fährt und danach stoppt.

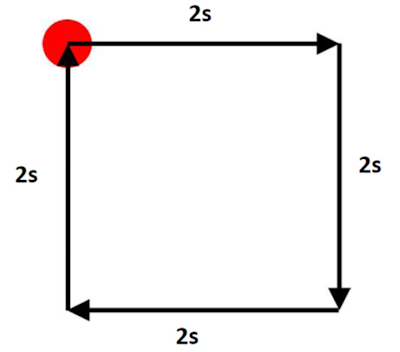
Aufgabe MOTOR3 - Quadrat
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) ein Quadrat fährt: 2 Sekunden geradeaus, um 90 Grad drehen, wieder 2 Sekunden geradeaus usw. bis er wieder an seinem Startpunkt ankommt und stehen bleibt.
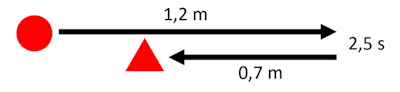
Aufgabe MOTOR4 - Fahren von Strecken
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) genau 1,2 Meter geradeaus fährt, 2,5 Sekunden stehen bleibt und dann 0,7 Meter rückwärts fährt.
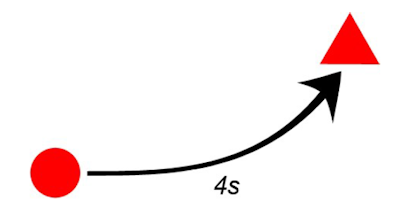
Aufgabe MOTOR5 - Fahren einer Kurve
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) für 4 Sekunden eine leichte Kurve nach links fährt und danach stoppt.
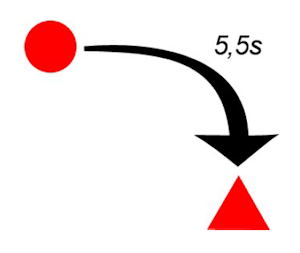
Aufgabe MOTOR6 - Fahren einer Kurve
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) für 5,5 Sekunden eine starke Kurve nach rechts fährt und danach stoppt.
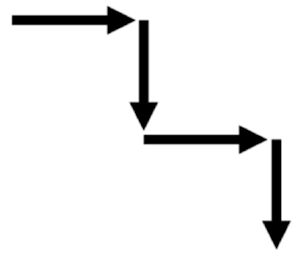
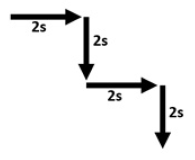
Aufgabe MOTOR7 - Treppenmuster
Erstelle ein Programm, mit dem der Roboter (Standardroboter mit zwei Motoren) ein Treppenmuster fährt. Bei den Richtungsänderungen soll er sich immer am Stand drehen.
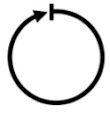
Aufgabe MOTOR8 - Kreis
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) einen Kreis fährt und genau an der Ausgangsposition stoppt. Die Motorleistung kann dabei beliebig gewählt werden.
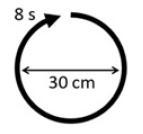
Aufgabe MOTOR9 - exakter Kreis
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) einen Kreis mit einem Durchmesser von ca. 30 cm fährt. Dafür soll der Roboter genau 8 Sekunden brauchen.
Aufgabe MOTOR10 - komplexer Bewegungsablauf
Erstelle ein Programm mit dem ein Roboter (Standardroboter mit zwei Motoren) den folgenden Bewegungsablauf mit unterschiedlichen Geschwindigkeiten nachfährt. Die Geschwindigkeiten können dabei beliebig gewählt werden:
- beide Motoren für 4 Sekunden vorwärts
- Roboter hält für 2 Sekunden an
- Drehung am Stand für 3 Sekunden
- Roboter fährt für 3 Sekunden rückwärts
- Drehung nur mit einem Rad für 5 Sekunden
- Roboter hält für 4 Sekunden an
- Roboter fährt 2 Sekunden lang rückwärts
- Roboter stoppt
LED
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt LED
Aufgabe LED1 - LED Blinker
Erstelle ein Programm, das nach dem Start die LED im Sekundentakt 10 mal aufleuchten zu lässt.
Display - Text
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Display - Text
Aufgabe DISPLAY1 - Zentrierte Ausgabe von statischen Text
Auf dem Display soll in der ersten Zeile das Wort "Willkommen" und in der dritten Zeile das Wort "Open-BOT" jeweils zentriert ausgegeben werden.
Aufgabe DISPLAY2 - Statische und Dynamische Ausgabe von Text
Zunächst soll beim Start des Programms in der ersten Zeile beginnend an der ersten Position das Wort "Sekunden:" angezeigt werden.
Im Anschluss daran sollen im Sekundentakt mit einem Zeichen Abstand hinter demWort "Sekunden:" abwechselnd die folgenden Wörter in einer Endlosschleife angezeigt werden: "null" - "eins" - "zwei" - "drei" - "vier" - "fünf" - "sechs" - "sieben" - "acht" - "neun" - "zehn" .
Dabei soll die nächste Zeitangabe die vorige überschreiben.
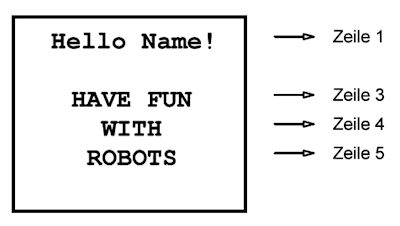
Aufgabe DISPLAY3 - Zentrierte Ausgabe von statischen Text
Erstelle ein Programm, bei dem zentriert in der Mitte des Displays folgender Text ausgegeben wird (setze in der Zeile 1 deinen Namen ein).
Aufgabe DISPLAY4 - Dynamische Ausgabe von Text
Ergänze das Programm von Aufgabe DISPLAY3 so, dass eine Zeile nach der anderen in einem zeitlichen Abstand von drei Sekunden erscheint. Dann soll das Display gelöscht werden und die laufend wiederholte Anzeige einer Zeile nach der anderen wieder von vorne beginnen.
Aufgabe DISPLAY5 - Blinken von Text
Erstelle ein Programm, mit dem abwechselnd in der zweiten und der vierten Zeile der Text "Blink!" im Sekundentakt angezeigt wird.
Display - Zahlen
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Display - Zahlen
Aufgabe DISPLAY6 - Countdown
Erstelle ein Programm, das einen Countdown von 255 bis 0 anzeigt. Zunächst soll in der ersten Zeile der Text "Countdown:" ausgegeben werden.
Mit einem Zeichen Abstand dahinter sollen Zahlen von 255 bis 0 im Takt einer Zehntelsekunde herunter zählen. Diese Zahlen sollen aber nicht als normaler Text, sondern in einer Integervariable abgelegt werden, deren Wert jede Zehntelsekunde um eins erniedrigt wird.
Ist dieser Countdown bei 0 angekommen, soll dieser wieder bei 255 starten.
Taster
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Entscheidungsabfrage und die User-Taster
Aufgabe BUTTON1 - Textanzeige Taster
Erstelle ein Programm mit dem man den Zustand eines gedrückten Tasters am Display sieht.
Ist der Schaltkontakt in Taster B1 geschlossen, soll am Display an einer beliebigen Stelle "B1" angezeigt werden, ist der Kontakt in Taster B2 geschlossen, soll am Display an einer anderen Stelle "B2" angezeigt werden. Sinngemäß soll dies auch für die Taster B3 und B4 implementiert werden.
Aufgabe BUTTON2 - Einstellen von Variablenwerten 1
Erstelle ein Programm mit dem durch Drücken der Wert einer Variablen verändert werden kann.
Mit dem Taster 1 soll der Wert um zehn verringert, mit Taster 2 um eins verringert, mit Taster 3 um eins erhöht und mit Taster 4 um zehn erhöht werden. Der aktuelle Wert der Variable soll im Display angezeigt werden.
Aufgabe BUTTON3 - Einstellen von Variablenwerten 2
Erstelle ein Programm mit dem durch Drücken der Wert einer Variablen verändert werden kann. Grundsätzlich soll mit dem Taster 3 und dem Taster 4 der Wert einer Variable um eins verringert bzw. um eins erhöht werden.
Ergänzend dazu soll mit Taster 1 und Taster 2 die Schrittweite des Hinauf- bzw. Hinunterzählens auf eins, fünf oder zehn eingestellt werden können.
In Zeile 1 des Displays soll der Text "Schrittweite:" und dahinter die aktuelle Schrittweite und in Zeile 2 der aktuelle Wert der Variable hinter dem Text "Zähler:" angezeigt werden.
Schleifen
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Schleifen und wiederholtes Ausführen von Codeblöcken
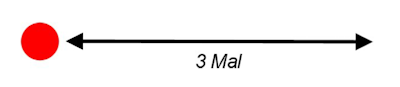
Aufgabe SCHLEIFE1 - Wiederholtes Vorwärts- und Rückwärtsfahren
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) 3 Mal 2 Sekunden mit 85% Motorleistung vorwärts fährt, wieder die gleiche Strecke rückwärts fährt und danach stoppt. Verwende für die mehrfache Ausführung dieses Bewegungsvorgangs einmal eine while- und einmal eine for-Schleife.
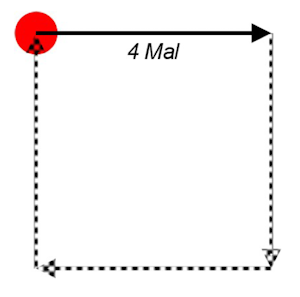
Aufgabe SCHLEIFE2 - Quadrat
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) 4 Mal 2 Sekunden geradeaus fährt, sich um 90 Grad nach rechts dreht und somit seine Bahn ein Quadrat beschreibt. Verwende für die vierfache Ausführung des Bewegungsvorgangs geradeaus - drehen einmal eine while und einmal eine for-Schleife.
Aufgabe SCHLEIFE3 - Treppenmuster
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) ein Treppenmuster fährt. Bei den Richtungsänderungen soll er sich immer am Stand drehen. Verwende für sich wiederholende Bewegungsabläufe einmal eine while- und einmal eine for-Schleife.
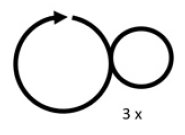
Aufgabe SCHLEIFE4 - Achterbahn
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren) dreimal einen liegenden Achter fährt. Der eine Kreis des Achters soll dabei deutlich größer als der andere Kreis sein. Der Roboter soll dafür zwischen 20 und 25 Sekunden brauchen. Verwende für sich wiederholende Bewegungsabläufe einmal eine while- und einmal eine for-Schleife.
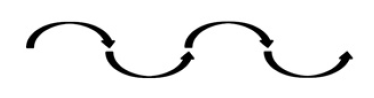
Aufgabe SCHLEIFE5 - Schlagenlinien
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und Nachlaufrad) für 10 Sekunden eine Schlangenlinie fährt und danach stoppt. Sich wiederholende Bewegungsabläufe sollen einmal mit einer while- und einmal mit einer for-Schleife realisiert werden.
Kombinierte Aufgabenstellungen
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Grundlagen
Aufgabe KOMB1 - Motortestprogramm
Am KeplerOpenBOT Controller soll ein Motor an den Motor-Port ML angeschlossen sein. Erstelle ein Programm zum Testen des Motors.
Durch Drücken des Tasters T1 soll sich der Motor mit maximaler Geschwindigkeit in die eine, durch Drücken des Tasters T4 mit maximaler Geschwindigkeit in die andere Richtung drehen.
Mit den Tastern T2 und T3 soll sich der Motor auch sinngemäß in beide Richtungen, diesmal aber mit reduzierter Geschwindigkeit drehen.
Drückt man die Taster T2 und T3 gleichzeitig, soll der Motor aufhören sich zu drehen.
Aufgabe KOMB2 - Steuern von Geschwindigkeiten
And den KeplerOpenBOT Controller ist ein Motor an den Motor-Port ML angeschlossen und im Programm soll eine Integer-Variable mit dem Namen Geschwindigkeit definiert werden. Mit den Tastern T1 und T4 soll der Wert der Variable Geschwindigkeit erhöht und verringert werden können.
Der aktuelle Wert der Variable Geschwindigkeit soll in der Folge dazu dienen um mit der Funktion WRITE_MOTOR(port,value) die Drehgeschwindigkeit des Motors festzulegen.
Zur Kontrolle des aktuellen Geschwindigkeitswerts soll am Display in Zeile 1 der Text "Speed:" und dahinter mit einem Zeichen Abstand der Wert der Variable Geschwindigkeit angezeigt werden.
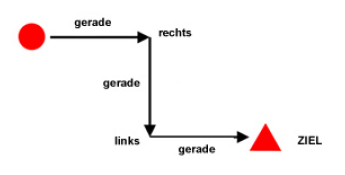
Aufgabe KOMB3 - Anzeige von Bewegungsabläufen
Erstelle ein Programm, bei dem ein Roboter (Standardroboter mit zwei Motoren) die vorgegebene Figur nachfährt. Dabei soll der aktuelle Bewegungsablauf mit den in der Grafik angegebenen Bezeichnungen am Display angezeigt werden.