Reflexionssensor
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Motorsteuerung und Reflexionssensor
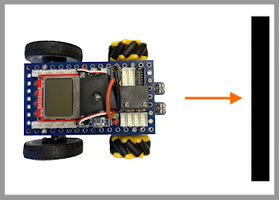
Aufgabe R1 - Stoppen bei einer schwarzen Line
Erstelle ein Programm, mit dem ein Roboter mit einem Reflexionssensor auf eine schwarze Linie zufährt und stehen bleibt, sobald der Reflexionssensor diese Linie erkennt. Zu Beginn des Skripts soll der Roboter geradeaus fahren. Dann soll laufend überprüft werden, ob sich der Sensor über einer schwarzen Fläche befindet, oder nicht.
Am Display soll laufend aktualisiert der Bewegungsvorgang des Roboters mit den Worten FAHREN oder STOPP angezeigt werden. Begleitend dazu soll die ermittelte Sensorinformation laufend mit WHITE oder BLACK am Display ausgegeben werden.
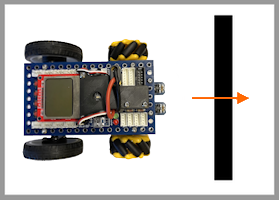
Aufgabe R2 - Überfahren einer schwarzen Linie
Erstelle ein Programm, mit dem ein Roboter (Standardroboter mit zwei Motoren und einem nach unten gerichteten Reflexionssensor an der Vorderseite) so lange geradeaus fährt, bis er auf eine schwarze Linie am Boden trifft. Erst wenn der Sensor die Linie überfahren hat und wieder den weißen Untergrund erreicht hat, soll der Roboter stehen bleiben.
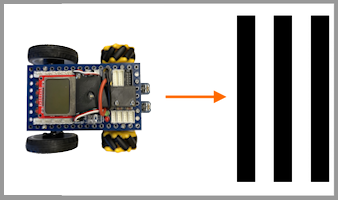
Aufgabe R3 - Zählen von schwarzen Linien
Erstelle ein Programm (Standardroboter mit zwei Motoren und einem nach unten gerichteten Reflexionssensor an der Vorderseite), das die Anzahl von schwarzen Linie ermittelt, die der Roboter überfährt. Zu Beginn des Skripts beginnt der Roboter geradeaus zu fahren. Laufend sollen die Werte des Sensors eingelesen werden. Der Wert einer Variable vom Typ int, die vor der Endlosschleife mit dem Startwert 0 festgelegt wurde, soll immer dann um eins erhöht werden, wenn der Roboter eine schwarze Linie passiert hat.
Der aktuelle Wert der Variable soll am Display in der Form LINIEN: 3 angezeigt werden. Nach der dritten Linie soll der Roboter selbstständig stehen bleiben.
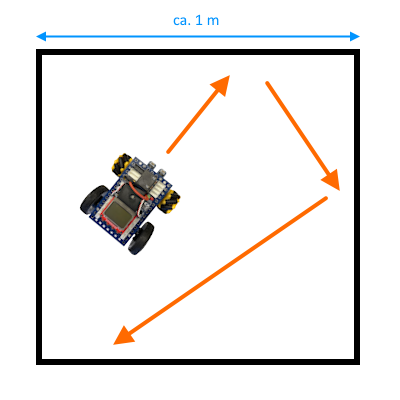
Aufgabe R4 - Fahren innerhalb eines Quadrats mit schwarzen Linien
Erstelle ein Programm für eine Standardroboter mit zwei Motoren und einem an der Vorderseite nach unten gerichteten Reflexionssensor, mit dem ein Roboter innerhalb eines Quadrats autonom navigieren kann, ohne aus diesem hinauszufahren. Auf einem weißen Papier wird mit einem Klebeband ein schwarzes Quadrat mit einer Seitenlänge von ca. 1m aufgeklebt oder auch aufgemalt. Der Roboter wird in einer beliebigen Richtung innerhalb des Quadrats poisitioniert und soll zunächst geradeaus fahren.
Wiederholt werden die Werte des Reflexionssensors laufend ausgelesen und dazu verwendet, um zu bestimmen, ob dieser bereits über einer schwarzen Linie ist. Sobald dies der Fall ist, soll sich der Roboter am Stand um 110° nach rechts drehen und dann seine Fahrt fortsetzen.
Am Display soll begleitend FAHREN oder DREHEN angezeigt werden, je nachdem, welche Bewegung der Roboter gerade ausführt. Beendet soll das Programm durch Drücken eines der vier Buttons am Roboter werden.
Orientierung im Raum
Aufgabe I1 - Anzeigen der yaw-Werte bei einer Kreisfahrt
Verwende bei der Lösung dieser Aufgabenstellung Informationen aus dem Abschnitt IMU Orientierungssensor BNO055 und Motorsteuerung
Erstelle ein Programm, mit dem ein Roboter langsam einen Kreis fährt. Zunächst soll der aktuelle yaw-Wert auf 0 gesetzt werden, der dann die Ausrichtung des Roboters beim Start des Skripts beschreibt. Im Anschluss daran soll in einer Endlosschleife laufend der aktuelle yaw-Wert ermittelt und am Display in der Form yaw-Wert: 23 angezeigt werden.
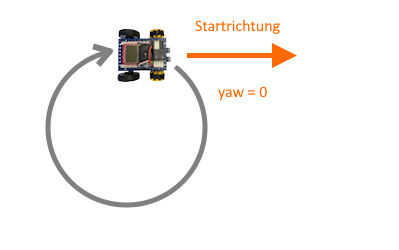
Nun sollen die angezeigten Werte während der Fahrt des Roboters genau beobachtet werden, um nachzuvollziehen, wie sich die Winkelangaben des yaw-Werts in Bezug auf den mit 0 festgelegten Wert der Startrichtung ändern.
Die Ausführung dieses Programms soll durch Drücken eines Tasters beendet werden.