Bewegung mit Timer
Verwende bei der Lösung dieser Aufgabenstellungen die Informationen aus dem Abschnitt Zeitgesteuerte Bewegungsabläufe unter Verwendung des Timers
Aufgabe T1
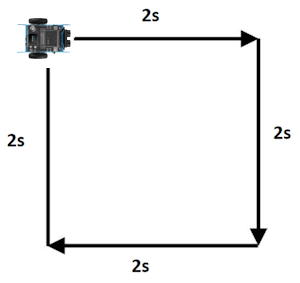
Erstelle ein Skript, mit dem ein mBot2 Roboter ein Quadrat fährt: 2 Sekunden geradeaus, um 90 Grad drehen, wieder 2 Sekunden geradeaus usw. bis er wieder an seinem Startpunkt ankommt und stehen bleibt. Nachdem das Programm am Roboter gestartet wurde, soll die Fahrt des Roboters aber erst nach 3 Sekunden beginnen. Für die Zeitintervalle soll der Timer zum Einsatz kommen und der Roboter automatisch beim Erreichen der Zielposition stehen bleiben. Während dem Abfahren des Pfades soll es möglich sein, das Skript jederzeit durch Drücken des quadrtischen Buttons am Controller (Button A) zu beenden.
Aufgabe T2
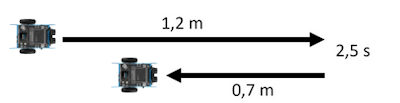
Erstelle ein Skript mit dem ein mBot2 Roboter genau 1,2 Meter geradeaus fährt, 2,5 Sekunden stehen bleibt und dann 0,7 Meter rückwärts fährt.
Nachdem das Skript am Roboter gestartet wurde, soll der Roboter gleich losfahren. Die vorgegebenen Wegstrecken sollen unter Verwendung des Timers gefahren werden, das Skript soll aber nicht beendet werden, wenn der Roboter am Zielpunkt angekommen ist. Das Skript muss jederzeit durch Drücken des quadratischen Buttons (Button B) am Controller beendet werden können.
Drehung mit IMU Sensor
Verwende bei der Lösung dieser Aufgabenstellung die Informationen aus dem Abschnitt Exakte Drehung eines Roboters mit dem IMU-Sensor
Aufgabe I1
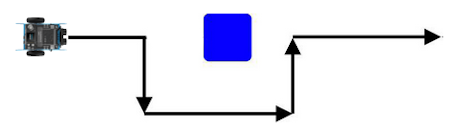
Erstelle ein Skript, mit dem ein mBot2 Roboter gerade auf ein Hindernis zufährt und kurz vor einer Berührung ein Ausweichmanöver startet. Das Hindernis soll dabei rechts oder links umfahren, aber nicht berührt werden. Der Roboter soll danach seinen Weg wie zuvor fortsetzen.
Für die Drehungen des Roboters soll der IMU-Sensor zum Einsatz kommen und dazu der aktuelle Wert des Sensors kurz vor dem Berühren des Hindernisses als Ausgangswert dienen. Für die zu fahrenden Strecken beim Ausweichmanöver um das Hindernis soll der Timer verwendet werden.
Folgen einer Linie mit einem Sensor und schwarz-weiß Erkennung
Aufgabe 1 - Fahren entlang einer geraden Linie
Klebe auf einer weißen Fläche oder einem weißen Papier mit einem Klebeband eine gerade, schwarze Linie mit der Länge von ca. 1 m auf. Modifiziere den vorliegenden Code aus dem Abschnitt Folgen einer Linie mit einem Sensor und schwarz-weiß Erkennung dahingehend, dass der Roboter zu Beginn mit dem Sensor 2 auf der Linie steht und dann links von der Linie fährt.
Passe dabei die einzelnen Motorgeschwindigkeiten und die Differenz der beiden Geschwindigkeiten so an, dass der Roboter so schnell wie möglich, aber auch sicher entlang der Linie fährt, ohne diesen Pfad zu verlieren.
Der Roboter wird durch Drücken der Home-Taste angehalten.

Aufgabe 2 - Fahren entlang einer geraden Linie
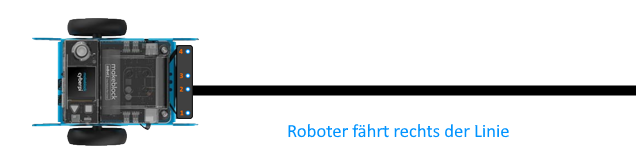
Modifiziere den Code aus Aufgabe 2 so, dass der Roboter zu Beginn wieder mit dem Sensor 2 auf der Linie steht, nun aber rechts von der Linie fährt. Die Ausführung des Skripts wird durch Drücken des Home-Buttons beendet.
Aufgabe 3 - Fahren auf der Innenseite der Original-Bahn mit einem Sensor und schwarz-weiß Erkennung
Verwende bei dieser Aufgabe das Beispiel-Skript aus Folgen einer Linie mit einem Sensor und schwarz-weiß Erkennung und modifiziere dieses!
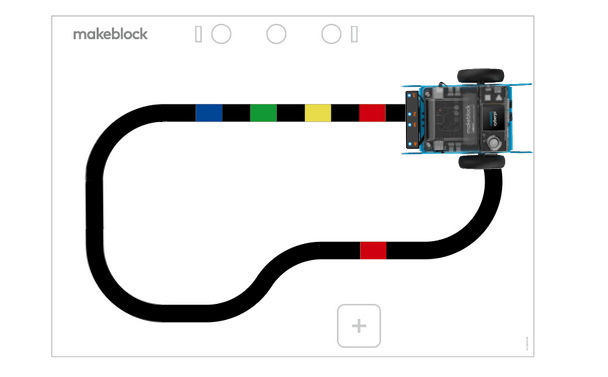
Der Roboter soll so wie in der Abbildung gezeigt so auf die Bahn gestellt werden, dass sich der Sensor 2 direkt über der schwarzen Linie befindet. Durch die Verarbeitung der Informationen des Sensors 2 soll der Roboter auf der Innenseite der Bahn die Linie entlang fahren. Die farbigen Stellen entlang der Bahn sind so dunkel, dass die Funktion mbuild.quad_rgb_sensor.is_line(2) diese auch als schwarze Linie identifiziert.
Sollte es nicht gelingen, die optimalen Werte für die beiden Motorgeschwindigkeiten und die Differenz zwischen diesen beiden zu finden, so kann auch selbst mit schwarzem Klebeband eine eigene Bahn auf einem weißen Untergrund oder einem weißen Papier aufgeklebt werden. Dabei ist zu beachten, dass die Radien der Kurven nicht zu klein gewählt werden.
Folgen einer Linie mit einem Sensor und Grauwerten
Verwende bei dieser Aufgabe das Beispiel-Skript aus Folgen einer Linie mit einem Sensor und Grauwerten und modifiziere dieses!
Aufgabe 1 - Suchen der bestmöglichen Motorgeschwindigkeiten für eine vorgegebene Linie
Aufgabe 2 - Erweitern der Bereiche unterschiedlich starker Korrekturbewegungen