Hinweise für die mündliche Prüfung
Erklärungen anhand von grafischen Darstellungen
Worin besteht der Unterschied zwischen einem DC-Motor und einer Servo-Motor?
Ein Gleichstrommotor besteht nur aus elektromechanischen und magnetischen Komponenten welche elektrische Energie in eine kontinuierliche Drehbewegung umsetzen.
Servo-Motoren bestehen aus einem Gleichststrommotor und zusätzlich einem Getriebe und einer Steuerelektronik, wodurch es möglich ist gewünschte Positionen gezielt anzufahren und diese unter Kraft zu halten.
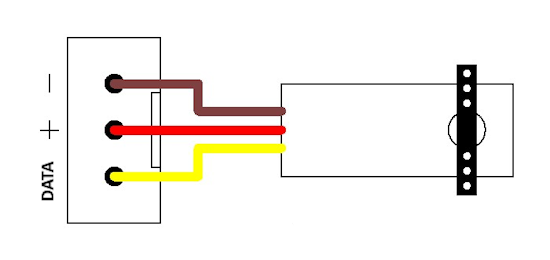
Welche Anschlüsse hat ein Servo-Motor?
Ein Servo-Motor besitzt drei Anschlüsse: einen Plus- und einen Minusanschluss für die Stromversorgung und einen für die Datenleitung über die digitale Signale von einer externen Steuereletronik zum Servo übertragen werden.
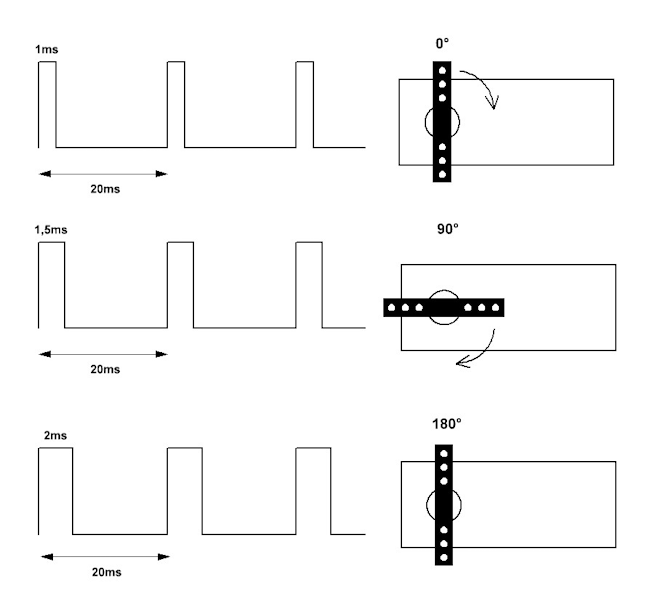
Wie sieht das digitale Signal aus, mit dem Servo-Motoren angesteuert werden?
Servo-Motoren werden mit einem PWM-Signal (Pulsweitenmodulation) angesteuert. Das Intervall zwischen den Impulsen beträgt 20 Millisekunden und die Länge der Impulse liegt zwischen 1 und 2 Millisekunden. Die Impulslängen bestimmen dabei die Position der Drehachse des Servos.
| 1 ms | Ein Impuls von etwa 1 ms bewegt die Drehachse auf die Minimalstellung (in der Regel 0°) |
| 1,5 ms | Ein Impuls von 1,5 ms positioniert die Drehachse in Mittelstellung (ca. 90°) |
| 2 ms | Ein Impuls von 2 ms bewegt die Drehachse auf die Maximalstellung (meist 180°) |
An welchen Pin eines Mikrocontrollers kann die Datenleitung eines Servo-Motors angeschlossen werden und über welche Funktionalität muss dieser Pin verfügen?
Die Datenleitung muss an einen digitalen Ausgangspin eines Mikrocontrollers angeschlossen werden, an dem ein PWM-Signal mit einer Frequenz von 50 Hz (Intervall 20 ms) generiert werden kann.
Erkläre das Prinzip eines Servo-Motors hinsichtlich des mechanischen und elektronischen Aufbaus!
Ein Servo-Motor besteht aus einem DC-Motor, einem Getriebe, einer Steuerelektronik und einem Potentiometer, welches der Steuerelektronik eine Rückmeldung über die aktuelle Position der Drehachse mit dem Servobalken gibt.
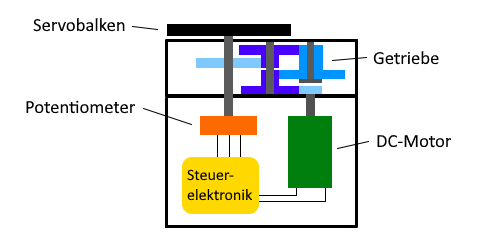
Die Steuerelektronik wertet das PWM-Signal am Dateneingang aus und vergleicht die dort codierte Position (z. B. 1ms Impulsbreite für Drehwinkel 0°) mit der am Potentiometer gemessenen Spannung. Stimmen diese beiden Informationen nicht überein, so wird der Motor in Bewegung gesetzt, um den Servobalken in die gewünschte Position zu drehen. Dort wird dieser dann gehalten.