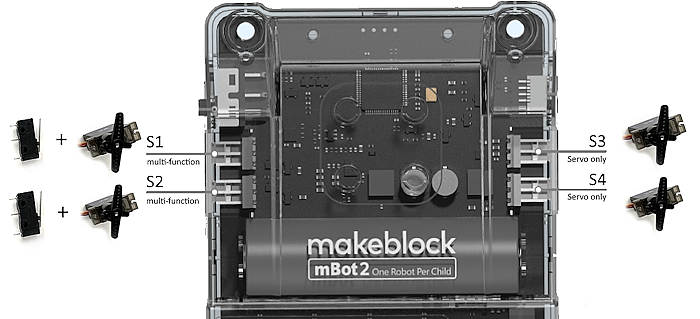
An den beiden Anschlüssen S1 und S2 am mBot2 Roboter können Schalter oder Taster angeschlossen werden. Diese werden dabei als digitale Eingänge genutzt um auszuwerten, ob ein Schaltkontakt offen oder geschlossen ist.
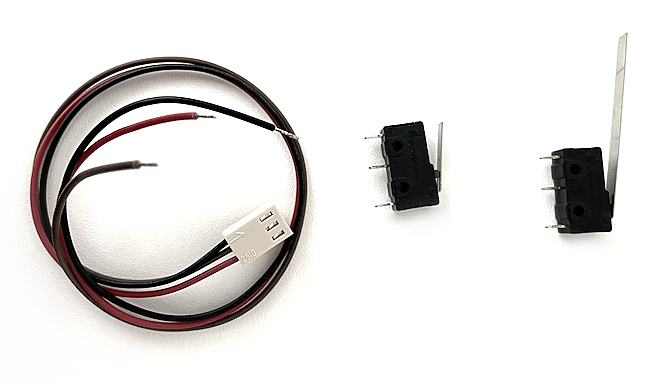
Mikroschalter für eigene Sensoren
Für den Bau eigener Sensoren (z. B. zum Erkennen des Berührens eines Hindernisses) bietet es sich an, sogenannte Mikroschalter zu verwenden, da diese einen exakten Schaltpunkt haben.
Anschluss eines Schalters oder Tasters an den S1 oder S2 Port
Die beiden Kontakte eines Schalters oder Tasters werden bei den Ports S1 und S2 so angeschlossen, dass diese mit den Pins S1 bzw. S2 und dem Pin mit der Bezeichnung - verbunden werden. Wird der elektrische Kontakt in einem Schalter oder Taster geschlossen, so besteht eine elektrische Verbindung zwischen den Pins S1 / S2 und dem Minus Pin. Dies kann mit einer Python Funktion abgefragt werden.

Programmbeispiel - Einlesen des Zustands eines Tasters am Port S1
An einen mBot2 Roboter wird an den Port S1 ein Taster angeschlossen. Dies erfolgt, wie in der oberen Abbildung dargestellt. Innerhalb einer Schleife wird laufend der Zustand des Tasters abgefragt und am Display eine entsprechende Meldung angezeigt.
import cyberpi, mbot2while True:if mbot2.read_digital(1)==True:cyberpi.display.show_label("Kontakt geschlossen", 16, 0, 0)else:cyberpi.display.show_label("Kontakt offen", 16, 0, 0)
Erklärungen zu diesem Programmbeispiel
Zeile 4: if mbot2.read_digital(1)==True:
Mit der Funktion mbot2.read_digital(port) kann der elektrische Zustand des jeweiligen Ports ermittelt werden, der dabei als digitaler Eingang gesehen wird.
port: 1, 2 (1 für S1, 2 für S2)
return: True, False (True: Kontakt geschlossen, False: Kontakt offen)
Zusammenfassung - Was wurde in diesem Abschnitt gelernt?
- Der mBot2 Roboter besitzt 4 Möglichkeiten zum Anschließen externer Hardware.
- An die Anschlüsse S1 und S2 können Schalter oder Taster angeschlossen werden.
- Die elektrischen Kontakte eines Schalters oder Tasters werden mit den Pins S1/S2 und dem Minus Pin der beiden Anschlüsse verbunden.
- Mit der Funktion mbuild.read_digital(port) kann ermittelt werden, ob eine elektrische Verbindung zwischen den Pins S1/S2 und dem Minus Pin besteht, also ein Schaltkontakt geschlossen ist. Diese Funktion liefert den Wert True oder False zurück.