Mit der frei erhältlichen Entwicklungsumgebung kann man nicht nur Python-Skripts für die OpenMV Cam schreiben und diese auf die Kamera hinaufladen, sondern auch den aktuell aufgenommenen Videostream anzeigen lassen. Dabei ist es zusätzlich möglich, Ergebnisse der eigenen Auswertungen direkt im Videobild mit grafischen Elementen wie Linien, Rechtecken, ... anzeigen zu lassen. So kann in einer LIVE-Ansicht überprüft werden, ob z. B. die Erkennung von Objekten mit den tatsächlichen Bilddaten übereinstimmt.
Die OpenMV IDE kann unter folgender Adresse heruntergeladen werden:
https://openmv.io/pages/download

Wenn man mit der OpenMV IDE Skripts entwickelt, gibt es zwei Möglichkeiten, diese laufen zu lassen. Entweder direkt auf dem Computer an den die OpenMV Cam über ein USB-Kabel angeschlossen ist, oder stand alone - direkt auf dem Kameraboard, ohne Verbindung zu einem Computer. Damit ist die OpenMV Cam bestens für autonome Robotersysteme geeignet.
Ausführen eines Skripts in der OpenMV IDE
Während der Entwicklung einer Software für die OpenMV Cam wird man diese meist in der OpenMV IDE laufen lassen und testen. In der Entwickungsumgebung bekommt man nicht nur ein LIVE-Bild der aktuellen Videodaten angezeigt, sondern kann über eine Konsole - den Serial Terminal - auch Text-Informationen ausgeben lassen. Damit lassen sich z. B. Werte von Variablen anzeigen, die man mit dem eigenen Skript ermittelt und später einem Robotik-System zur weiteren Verarbeitung zur Verfügung stellt.
Anschluss der OpenMV Cam
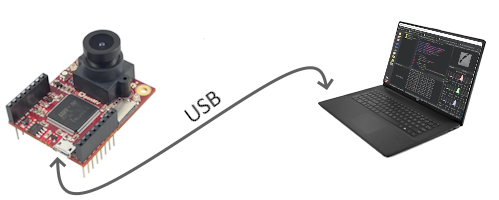
Das Kamerboard wird nur mit einem USB-Kabel an den Computer angeschlossen, auf dem die OpenMV IDE installiert ist. Eine zusätzliche Stromversorgung wird nicht benötigt, das Kameraboard wird über den USB-Anschluss des Computers mit Strom versorgt.
Verbinden der OpenMV Cam und Ausführen eines Skripts
Zum Verbinden des Kameraboard mit der Entwicklungsumgebung klickt man links unten auf das Symbol mit den beiden Steckern. Wurde die Verbindung erfolgreich hergestellt, so wird dort nur noch ein Stecker angezeigt und der Play-Button zum Starten eines Skripts darunter wird grün.

Ausführen eines Skripts auf der OpenMV Cam
Soll ein Skript auf einer OpenMV Cam im stand alone - Modus ausgeführt werden, so muss dieses zuerst auf die OpenMV Cam übertragen werden. Dazu wird diese über ein USB-Kabel an den Entwicklungscomputer angeschlossen und mit der OpenMV IDE verbunden.
Ist ein Skript fertig und wurde dieses in der IDE getestet, so wird dieses über Extras > Speichern Sie das geöffnete Skript in OpenMV Cam (als main.py) auf das Kameraboard übertragen. Nun kann die Verbindung über das USB-Kabel getrennt werden und die Software läuft auf dem Kameraboard, sobald dieses mit Strom versorgt wird.
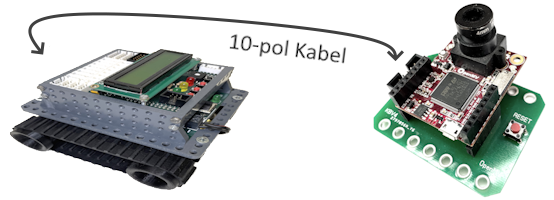
Anschluss der OpenMV Cam an einen KeplerBRAIN V4 Roboter
Das Kameraboard wird unter Verwendung der Montage- und Anschlussplatine über ein 10-poliges Kabel mit einem KeplerBRAIN V4 Mainboard verbunden. Über dieses Kabel erfolgt die Stromversorgung des Kameraboards, wie auch die Datenübertragung zwischen dem Mikrocontroller des KeplerBRAIN V4 Mainboards und dem OpenMV Kameraboard über die SPI Schnittstelle.
Die OpenMV Cam wird auf einem Roboter so montiert, dass der USB-Anschluss nach oben zeigt. So ist es jederzeit leicht möglich, ein USB-Kabel zum Entwicklen und Testen von Skripts anzuschließen.